This one is from way back in 2007, but the steps [hobbit] took to evaluate and repair a failed Prius Multi-Function Display (MFD) is a refresher course in how to go about fixing stuff that’s broken.
The 2004 / 2005 models of the Prius had peculiar problems with their MFD. Buttons and touch functions became sluggish and unresponsive, it wouldn’t display ECU data such as current and average fuel consumption, and couldn’t control stereo and air-conditioning. Lots of Prius users were reporting similar problems on the Priuschat forum.
The issues would usually arise long after warranty expired, and replacement units cost a couple of thousand dollars new. Toyota knew what the problem was (PDF link), but their fix involved swapping the defective units out.
[hobbit] managed to get a defective MFD unit from a friend, and because his own Prius still had a working MFD, he was able to carry out comparative tests on both units. The broken unit was generally laggy, and the buttons didn’t beep when pressed. Apparently, the AVCLan, a small data network between various components in the car, wasn’t reaching the MFD reliably. The MFD would send the “beep” command to the audio amplifier and wait for a confirmation that would never arrive. The system hung here until the MFD timed out.
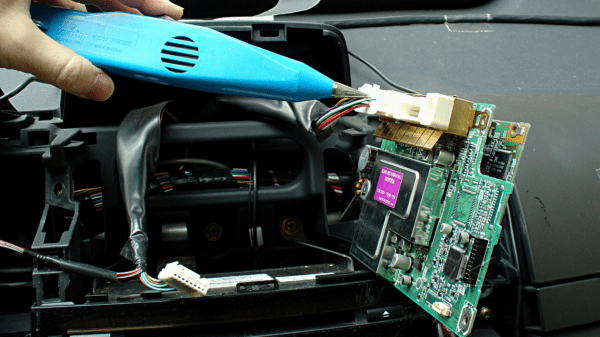
In the end, the cause of the problem was the 60-pin micro connector that interfaces the two main boards of the MFD. Once the two are mated, tightening the mounting screws twisted the two boards ever so slightly, leading to flaky contacts.
The fix? [hobbit] tweaked all of the 60 pins outwards enough that they still made contact even when the connector housing got twisted. Comparing the defective MFD to the one in [hobbit]’s own car also demonstrated how the factory fixed the problem.
Thanks to [Nick] for sending in this tip, which he stumbled upon “while searching for ideas for a very small solder tip to repair something on my laptop.”

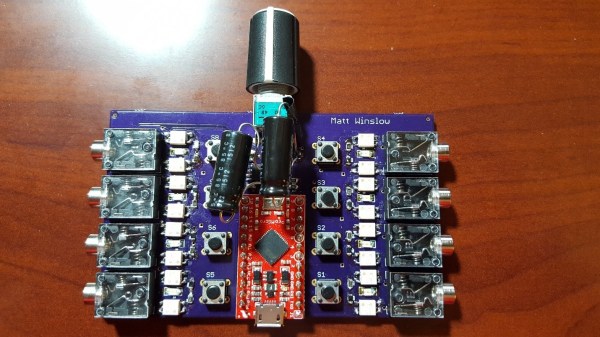

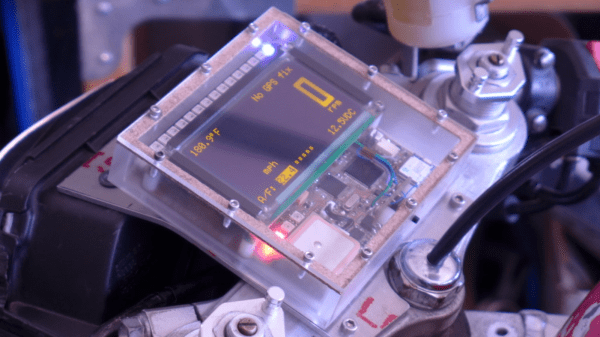
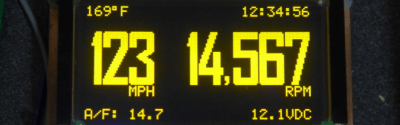 Luckily, he had the right skills and tools available to make sure this DIY hack lives up to the Streetfighter cred of his bike. The important parameter for him was to log the Air / Fuel mixture ratio so he could work on the carburation. Along the way, he seems to have gone a bit overboard with this build, but the end result is quite nice. The build centers around a
Luckily, he had the right skills and tools available to make sure this DIY hack lives up to the Streetfighter cred of his bike. The important parameter for him was to log the Air / Fuel mixture ratio so he could work on the carburation. Along the way, he seems to have gone a bit overboard with this build, but the end result is quite nice. The build centers around a 








