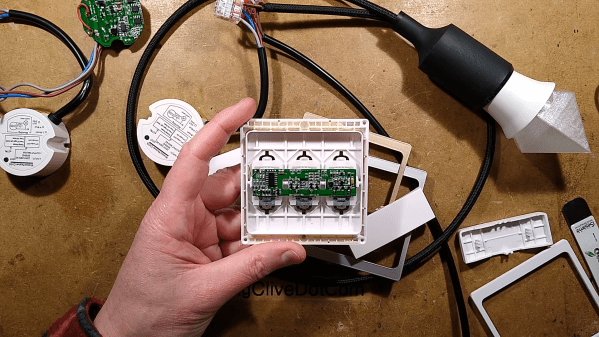
The plethora of wireless communications technologies have cut the comms wire for many applications, but these devices still require power. For home automation, this might mean a battery or mains power, but there is also an alternative that we don’t see often: Kinetic power. [Bigclivecom] bought some kinetic switches from eBay and gave it his usual reverse engineering treatment.
True to the marketing, these switches do not require external power or a battery to send a wireless signal. Instead, it harvests energy from the magnetic latching action of the switch itself. When the switch is actuated, a small current is induced in a coil as the polarity of the magnetic field through its core changes rapidly. Through a series of diodes and resisters, the energy is stored in a capacitor, which is then used to power a small transmitter chip. The antenna coil is wrapped around the switch housing.
The receiver side is powered by mains and includes a relay output for lights. It would be really nice to have a hacker-friendly module for projects. We would be curious to see the range that these devices are capable of.
The same technology is used inside the Philips Hue Tap switch, of which Adafruit did a teardown a few years ago. If you want to learn more about RF modulation, check out the crash course article we put out a while back. Of course, the RTL SDR is an indispensable and affordable tool if you want to do some experimentation.
Continue reading “Reverse Engineering Self-Powered Wireless Switches”