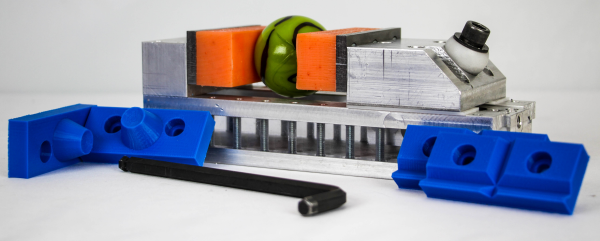
[Bob] wanted to build a pinball-drop-style resetting target that he could use while practicing with his pistol. His first idea was to make the targets sturdy enough for use with 9 mm ammunition, and he planned to use 1/2” thick steel for the targets and 11-gauge steel tubing for the frame. However, the targets weighed 50 pounds together and that was more weight than the pneumatic actuators could lift. He ended up using 1/4” steel and thereby halving weight. The downside was that [Bob] had to switch out the nine for a .22.
Controlling everything is a 555 circuit. When triggered, it opens up a relay for one second, which trips the solenoid valve controlling the pneumatic actuators. Originally he wanted to have switches under each target, and only by dropping all four would the reset circuit be triggered. However, he built a simpler solution: a bulletproof button off to one side–effectively a fifth target–that when triggered resets the targets.
HaD have some pretty good shots in our number but we’d probably end up hitting the pneumatic actuators at least once. [Bob] did add 16-gauge steel sheeting to protect the air lines and wires from bullet splatter, which in his experience is more of a threat than a direct hit.