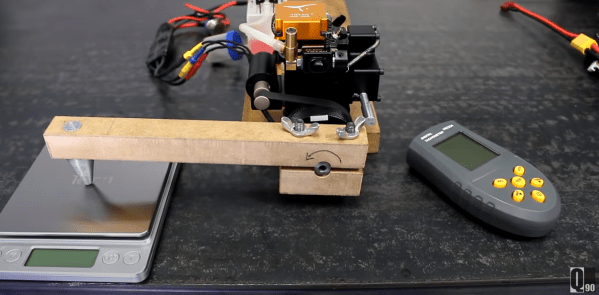
As you get ready to pop the hood of your RC car to drop in a motor upgrade, have you ever wondered how much torque you’re getting from these small devices? Sure, we might just look up the motor specs, but why trust the manufacturer with such matters that you could otherwise measure yourself? [JohnnyQ90] did just that, putting together an at home-rig built almost from a stockpile of off-the-shelf parts.
To dig into the details, [JohnnyQ90] has built himself a Prony Brake Dynamometer. These devices are setup with the motor shaft loosely attached to a lever arm that can push down on a force-measuring device like a scale. With our lever attached, we then power up our motor. By gradually increasing the “snugness” of the motor shaft, we introduce sliding friction that “fights” the motor, and the result is that, at equilibrium, the measured torque is the maximum amount possible for the given speed. Keep turning up that friction and we can stall the motor completely, giving us a measurement of our motor’s stall torque.
Arming yourself with a build like this one can give us a way to check the manufacturer’s ratings against our own, or even get ratings for those “mystery motors” that we pulled out the dumpster. And [JohnnyQ90’s] build is a great reminder on how we can leverage a bit of physics and and a handful of home goods to get some meaningful data.
But it turns out that Prony Brake Dynamometers aren’t the only way of measuring motor torque. For a disc-brake inspired, have a look at this final project. And if you’re looking to go bigger, put two motors head-to-head to with [Jeremy Felding’s] larger scale build.
Continue reading “Sanity Check Your Engines With This Dynamometer”