A talk from the recent Electromagnetic Field event in the UK caught our eye, in which [Amy Jeskins] looked at the overlooked engineering skill of pattern cutting. She takes us through the mechanics of creating a pattern for a piece of clothing, and asks why it is not a skill taught to engineers.
She’s a specialist in theatrical costume, and the talk takes us through some examples of her work before looking at the history of tailoring and pattern making. She explores flat cutting and draping a pattern on a form before coming into the present day with CAD packages designed for clothing work. It’s the social aspect of the talk that’s perhaps the most interesting, looking at how it has become a gendered skill and thus not something considered where it should belong, as engineering. We’re reminded of one of the most important additions for a healthy hackerspace, a textile room, as we’ve seen people there bridge this divide from both directions.
After getting his hands on a rope driver module from the Apollo project era that had a big ‘Scrapped Module’ stamped on it, [Mike Stewart] was naturally left curious as to what exactly had failed in this module. Originally destined for the Apollo Guidance Computer, these Raytheon-manufactured modules were the pinnacle of space-grade high-tech of the 1960s, with requisite acceptance testing so as to not endanger a very expensive space mission.
The cool part here is that the acceptance documents for the module in question (B16-B17) have been scanned in and can be found on the Internet Archive. With the part itself being potted and very much inaccessible, this document helpfully lays out the expected measurements on the module’s pins, as well as schematics and mechanical drawings. Unfortunately the reasons for the rejection were not recorded, so replicating the failing test results is required to understand the reason.
NASA Rope Driver Module with suspicious exploration marks. (Credit: Mike Stewart, YouTube)
A slight complication here is that the testing procedure doesn’t just involve hooking up a multimeter for some voltage and capacitance measurements. There are also temperature and voltage extremes, and vibration tolerance involved, which would be somewhat complex to test, but most of all risk damaging a historical artefact. Thus a somewhat conservative testing procedure was chosen, even if this may not reveal the actual fault.
As noted in the video, sometimes modules were also rejected because someone simply dropped it on the floor along the way. However, generally if a module was found to be faulty they would open it to diagnose said fault, with a closer look at this module indeed revealing suspicious marks in the potting compound where it was apparently opened and conceivably repaired. This also might explain why they also put the ‘For engineering use only’ on it.
With multiple of such locations visible in the potting compound, these locations were mapped to the schematics for the module, to get some idea of what may have been accessed. After this, basic testing was performed on the module, as per the acceptance testing document.
Along the way an error was detected in said document, in the form of the wrong pin number. In table 4-2 the input pin 269 was mistakenly listed as having output pin number 169 when it should have been pin 168. Pin 169 is chassis ground, so this was presumably fixed in a later version of the document.
After all the testing with just stationary, room-temperature conditions, everything appeared to check out. This means that likely this was indeed a repaired module that got subsequently used for engineering purposes rather than installed in flight-ready hardware. The only issue found was that channels were out of calibration, but whether this was an original flaw or due to the module being half a century old is hard to tell in the absence of repair logs.
Overall it’s an exciting opportunity to document another part of history, since so many of the details pertaining to these original modules and related technologies got lost or muddled over the decades.
For as long as humans have had writing, there’s been a need to send secret messages. It is easy to think that Enigma machines and their immediate predecessors are old tech, but they are much more recent than ancient systems used by the Greeks and Romans. Even Thomas Jefferson, one of the founding fathers of the United States, was interested in encryption and is often said to have invented the Jefferson Disk machine for encryption. The truth is, the device is probably older than Jefferson, but he certainly thought about using it for secret communications.
Simple but Effective
Thomas Jefferson was, apparently, a fan of secret messages
The idea is simple. We make a series of disks. Each disk has a number on it and, around the edge, all the letters of the alphabet. The placement of each wheel with the same number is the same, but, overall, the arrangement is random. That is, all disks marked #5 might start with XCBYG, but all disks marked with #10 could start with FAYQL. You take one set of disks, and I keep the other set.
When we want to send secret messages, we agree to arrange our disks on an axle in the same order. Jefferson used a 36-disk system, so we might agree to go left to right with the odd numbers first and then the even numbers, or any other setup that we could agree on.
Encryption
Once the wheels are in place, encryption is simple. There’s a bar across the device, and you line up your message using a wheel for each letter: ENEMYCOMESBYSEA, for example. Then you look at any different row, which will now read something crazy like: FSRSSXQCGAEEFOR (plus the random letters on the rest of the disks). That’s the message you send.
Car enthusiasts want to know how quickly they can make a quarter mile. Weightlifters are forever trying to add one more plate to the bar. Internet denizens have their own favorite number to brag about: the result from a speed test.
The ritual is familiar. Close a few browser tabs, click the big “Go” button, and watch the needle climb. Perhaps you pay for gigabit service and see 940 megabits per second, which produces a satisfied nod. Perhaps you see 299 megabits and begin obsessing over network hardware. But before you get too excited either way, try another test. There is a fair chance it will give you a different answer.
That does not necessarily mean one test is lying. “Internet speed” is not a single physical quantity waiting to be measured. A speed test measures the performance of a particular device, over a particular local connection, through a particular ISP route, to a particular server, at a particular time using a particular test method. Change any of those things and the answer can change too. Continue reading “The Need For Speed: Internet Speed Measurement (or DIY?)”→
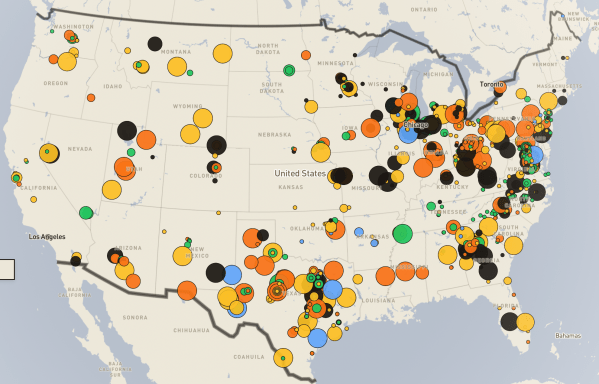
One of the biggest “David versus Goliath” stories in tech right now is the towns beset by AI data center projects they may or may not have asked for. Powered By Who is tracking data center development in the US on this convenient map.
Currently, there are over 2,100 data centers being tracked by the project ranging from proposals to sites fully up-and-running. While you have to build bypasses data centers to keep the internet running (which we’re partial to here at Hackaday), there are certainly questions around the amount of power and water consumed by these sites, the emissions they’re sending into the surrounding community, and who exactly is reaping the benefits.
Whether you’re pro, against, or ambivalent about the proliferation of “AI” data centers, the map offers an engaging way to look at what projects are happening around the nation, especially when you start looking at clusters and how that interacts with the power generation and political makeup in a region. It’s particularly interesting how only three states account for roughly 70% of all the projects. Let us know if there’s a similar tracker in your area if you’re from one of the other parts of the globe!
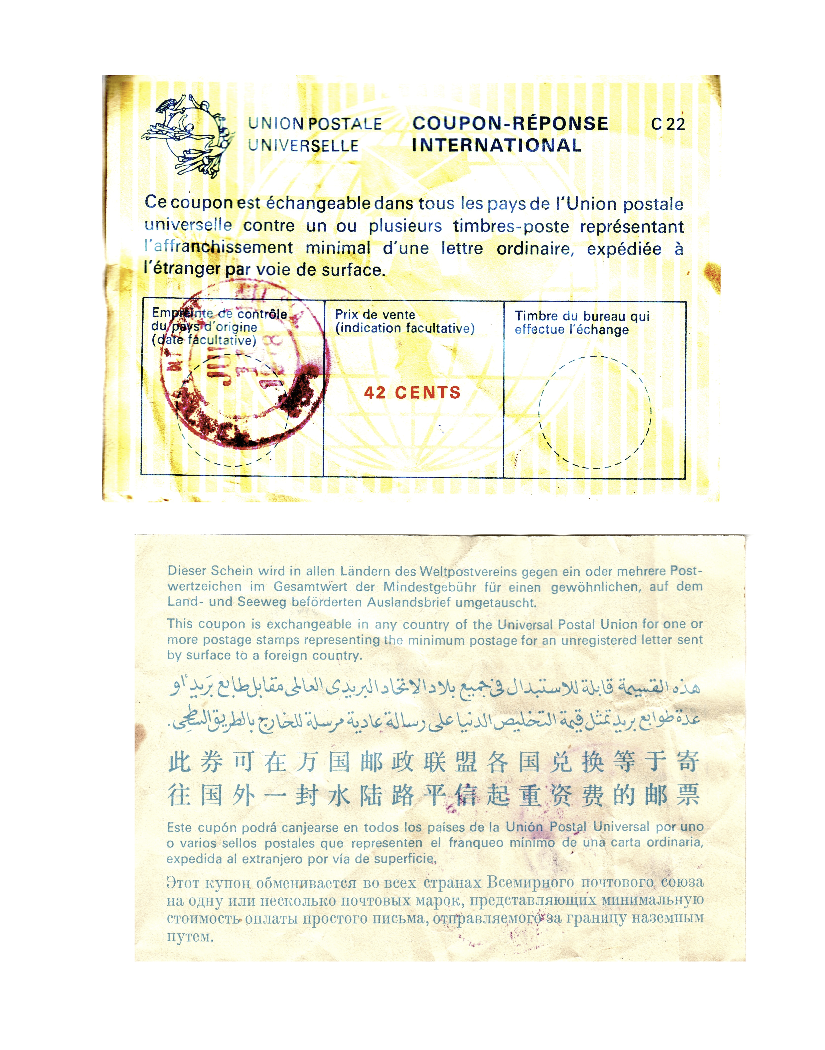
Have you ever found out that something you remember from your youth is now gone, and you didn’t even notice? If you are a certain age, you might feel that way when I deliver the news: You haven’t been able to buy International Reply Coupons (IRCs) at a US Post Office since early 2013. By the end of 2026, you won’t be able to buy them anywhere. The age of the IRC is over.
What’s an IRC?
An IRC from 1978 (public domain).
If that didn’t mean anything to you, you might be too young to remember, or maybe you just weren’t into shortwave listening or ham radio. Although there were other reasons to get IRCs, a radio hobby is the most likely reason a Hackday reader would have bought an IRC.
For radio purposes, here’s the problem. You’ve worked on your station for months, and one winter night, you finally pull in that rare station from Luxembourg. They’ll send you a QSL card to verify that you heard them. You only have to send them a letter telling them what time you heard them, what frequency, and some details about the program you heard. But they probably don’t want to pay the postage required to send hundreds or thousands of cards overseas.
While this is a radio-specific problem, you might find the same issue with pen pals or when trying to buy things from an overseas company.
SASE
If everyone were in the same country, the solution would be easy. Take a stamp, put it on an envelope that has your address on it, and stuff it in with the letter. Or, you could just drop a stamp or two in the letter you sent.
The problem is, US postage won’t help Radio Luxembourg. On the other hand, the effort required for you to buy postage that works in Luxembourg would have been a nightmare.
Enter the UPU
The Universal Postal Union is a UN agency that is effectively an association of post offices in 192 countries. Their charter is to facilitate mailing things worldwide.
The IRCs date back to 1906. The idea is you buy an IRC at your post office. You send it to Radio Luxembourg, or wherever. There, the mail person at the radio station could go to their post office and trade the coupon for enough local postage to send a surface letter worldwide.
Since the first V2 rocket sailed above the Kármán line back in 1944 and right up until the modern era, the trajectory of most space-bound rockets was more or less the same: after expending their propellants they would either crash into some desolate steppe or plunge into the ocean. In either event, the rocket was disposable. The important bit up top might go on to explore the stars or send a human crew off on their mission, but the booster rocket that lifted the spacecraft out of the atmosphere was always going to be sacrificed for the cause.
But in the 1970s NASA had a wild idea: what if we didn’t smash a brand-new rocket valued at millions of dollars into the ocean every time we wanted to put something in orbit? Instead, they would build a hybrid space vehicle that blended the vertical takeoff and raw power of a rocket with the capabilities of an airplane, allowing it and whatever it was carrying to make a gentle runway landing at the end of its mission. As such, the Space Shuttle was born.
With the benefit of hindsight, we now know the Shuttle wasn’t quite the spaceflight revolution that NASA had hoped for. The age of reusable rockets didn’t truly begin until 2015, when SpaceX landed the first stage of their Falcon 9. To date they’ve repeated the feat nearly 600 times, all the while increasing the reliability and speed of their operations. Today the Falcon 9 is the most prolific launch vehicle in history, and nearly every other rocket in active development is being designed to include some element of reusability.
Most recently, China demonstrated that they could recover their Long March 10B rocket by gently bringing it down into what amounts to a giant butterfly net. While it might seem a bit quaint compared to rockets that land on their tails like something out of a 1950s sci-fi movie, the idea offers considerable promise.