When we think about self-driving cars, we normally think about big projects measured in billions of dollars, all funded by major automakers. But you can still dive into this world on a smaller scale, as [jmoreno555] demonstrates.
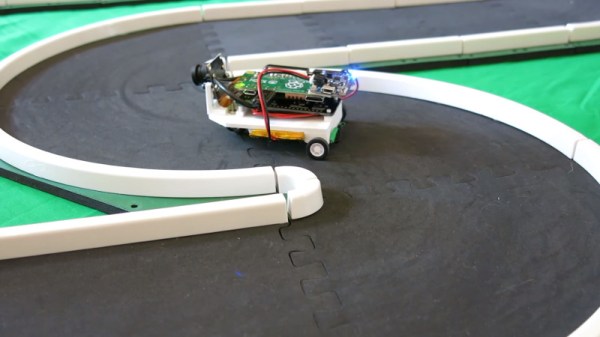
The build consists of a small RC car—an HSP 94123, in fact. It’s got a simple brushed motor inside, driven by a conventional speed controller, and servo-driven steering. A Raspberry Pi 4 is charged with driving the car, but it’s not alone. It’s outfitted with a Google Coral USB stick, which is a machine learning accelerator card capable of 4 trillion operations per second. The car also has a Wemos D1 onboard, charged with interfacing distance sensors to give the car a sense of its environment. Vision is courtesy of a 1.2-megapixel camera with a 160-degree lens, and a stereoscopic camera with twin 75-degree lenses. Software-wise, it’s early days yet. [jmoreno555] is exploring the use of Python and OpenCV to implement basic lane detection and other self driving routines, while using Blender as a simulator.
The real magic idea, though, is the treadmill. [jmoreno555] realized that one of the frustrations of working in this space is in having to chase a car around a test track. Instead, the use of a desktop treadmill allows the car to be programmed and debugged with less fuss in the early stages of development.
If you’re looking for a platform to experiment with AI and self-driving, this could be an project to dive in to. We’ve covered some other great builds in this space, too. Meanwhile, if you’ve cracked driving autonomy and want to let us know, our tipsline is always standing by!