We appear to have a new entry atop the “Robots That Creep Us Out” leader board: meet LEONARDO, the combination quadcopter/bipedal robot.
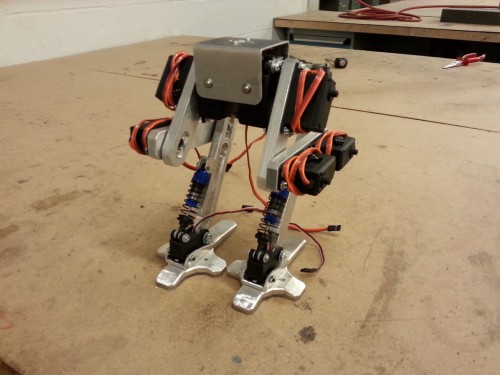
LEONARDO, a somewhat tortured name derived from “LEgs ONboARD drOne,” is actually just what it appears to be: a quadcopter with a set of legs. It comes to us from Caltech’s Center for Autonomous Systems and Technologies, and the video below makes it easy to see what kind of advantages a kinematic mash-up like this would offer. LEO combines walking and flying to achieve a kind of locomotion that looks completely alien, kind of a bouncy, tip-toeing step that really looks like someone just learning how to walk in high heels. The upper drone aspect of LEO provides a lot of the stabilization needed for walking; the thrust from the rotors is where that bouncy compliance comes from. But the rotors can also instantly ramp up the thrust so LEO can fly over obstacles, like stairs. It’s also pretty good at slacklining and skateboarding, too.
It’s easy to see how LEO’s multimodal locomotion system solves — or more accurately, avoids — a number of the problems real-world bipedal robots are going to experience. For now, LEO is pretty small — only about 30″ (76 cm) tall. And it’s rather lightly constructed, as one would expect for something that needs to fly occasionally. But it’s easy to see how something like this could be scaled up, at least to a point. And LEO’s stabilization system might be just what its drunk-walking cousin needs.
Continue reading “LEONARDO: The Hopping, Flying Bipedal Robot”