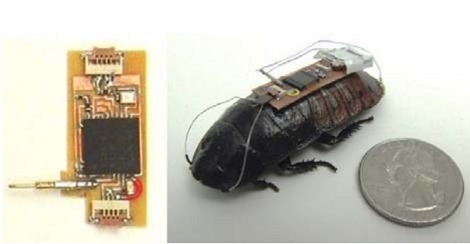
Producing micro robotics is not yet easy or cost-effective, but why do we need to when we can just control the minds of cockroaches? A team or researchers from North Carolina State University is calling this augmented Madagascar Hissing cockroach an Insect Biobot in their latest research paper (PDF). It’s not the first time the subject has come up. There have already been proofs in research and even more amateur endeavors. But the accuracy and control seen in the video after the break is beyond compare.
The roach is being controlled to perfectly follow a line on the floor. One of the things that makes this iteration work so well is that the microcontroller includes a new type of ADC-based feedback loop for the stimulation of the insect brain. This helps to ensure that the roach will not grow accustom to the stimulation and stop responding to it. Since this variety of insect can live for about two years, this breakthrough makes it into a reusable tool. We’re not sure what that tool will be used for, but perhaps the next plague of insects will be controlled by man, and not mother nature.
















