While most of the teams in this year’s Red Bull Creation didn’t really pay attention to the theme of ‘reinventing the wheel’, 1.21 Jiggawatts did. Their creation, a giant typewriter that can be suspended along the side of a building, takes its inspiration directly from 1970s typewriters and printers. Yes, it’s a giant daisy wheel typewriter.
The basic idea of a daisy wheel typewriter is a wheel with a few dozen petals, on the end of which is a single letter. To print a letter, the wheel spins around, and a solenoid mechanism strikes the letter against a piece of paper. This was cutting edge tech in the 70s, and was a fast (and cheap) way for computers to print out letter-quality reports.
1.21 Jiggawatts used a ladder as the rail to move down a line of text. The movement from line to line was supposed to be done by dangling the ladder off a chain with a few sprockets attached to motors. Unfortunately, the team couldn’t quite get the machine working for the competition and live event, but the build does show an amazing amount of creativity and respect for classic, forgotten technology.
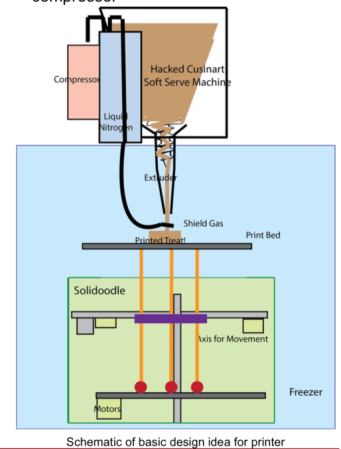
Three MIT students decided that 3D printers just aren’t interesting enough on their own any more. They wanted to design a new type of printer that would really get young kids engaged. What’s more engaging to children than sugary treats? The team got together to develop a new 3d printer that prints ice cream.
The machine is built around a Solidoodle. The Solidoodle is a manufacturer of “accessible” 3d printers. The printer is enclosed inside of a small freezer to keep things cold during the printing process. On top of the machine is a hacked Cuisinart ice cream maker. The machine also contains a canister of liquid nitrogen. The nitrogen is used to blast the cream as it leaves the print head, keeping it frozen for the 15 minute duration of the print.
It sounds like the team ran into trouble with the ice cream melting, even with the liquid nitrogen added. For a single semester project, this isn’t a bad start. Be sure to watch the clip of the machine running below.
It’s great having fresh vegetables just a few steps away from the kitchen, but it takes work to keep those plants healthy. [Pierre] found this out the hard way after returning from vacation to find his tomato plant withering away. He decided to put an end to this problem by building his own solar-powered plant watering system (page in French, Google translation).
An Arduino serves as the brain of the system. It’s programmed to check a photo resistor every ten minutes. At 8:30PM, the Arduino will decide how much to water the plants based on the amount of sunlight it detected throughout the day. This allows the system to water the plants just the right amount. The watering is performed by triggering a 5V relay, which switches on a swimming pool pump.
[Pierre] obviously wanted a “green” green house, so he is powering the system using sunlight. A 55 watt solar panel recharges a 12V lead acid battery. The power from the battery is stepped down to the appropriate 5V required for the Arduino. Now [Pierre] can power his watering system from the very same energy source that his plants use to grow.
Self-balancing robots are pretty cool, but sometimes a bit too complex to make. [HippoDevices] shows us that it’s really not that hard, and you can even do it with Lego NXT and an Android device!
First step is to build your two-wheeled robot – go nuts! As long as the Lego NXT motors are strong enough you’ll be able to make most different shaped robots easy to balance. You’re going to need an Android ADK board to provide communication between the Lego motors and your Android device. [HippoDevices] is using their own design, called the Hippo-ADK which is on Kickstarter currently.
This allows your Android device to read the status and control the Lego Motors — from there it’s just a matter of programming it to balance according to the device’s gyroscope.
For projects requiring a bit more juice, the mass production of those small rectangular lithium ion batteries for cell phones, cameras and other electronics are extremely useful — the problem is, how do you mount them, short of soldering the terminals in place? With a bit of perfboard of course!
[Jason] came up with this idea when he was trying to figure out a way to mount small lithium cells for a battery fuel gauge for another one of his projects. He found if you use good quality perfboard you can use a 90 degree male pin header to contact the terminals, and a strip of female pin header as a kind of battery stop at the other end. This allows you to very snugly squeeze the battery in place — you may need to adjust the length of the male pins though in order to fine tune the fit!
Now you can add a nice wire terminal, solder up the connections, and there you have it, an easy to make, extremely useful battery holder!
I don’t use that label lightly. After the Red Bull Creation’s day of show and tell was over — winners having been presented with trophies and stuffed with barbecue over at Bert’s — people started to trickle into OmniCorp Detroit for the party.
Like all of the best parties we didn’t really see it coming. I grabbed a folding chair on the street out front with a beer in my hand and enjoyed a rotating variety of interesting people to talk with. [Brian] rolled up riding one of the trophies, a modified toddler’s tricycle that proves his future with a travelling circuit is still viable. They roped off the area and set up huge speakers for the DJ. Then two guys game lumbering down the street sharing the work of hauling a tub full of ice and 12-ounce clear glass bottles with colored liquid inside. Turns out they just opened a distillery down the street and decided to donate some vodka infusions for the festivities. Yum!
Upstairs, a couple hundred square feet of area was ringed by a bar (with wide variety of kegs, slushy drinks, and one of those hot dog rollers), couches, a few work benches, a second DJ booth, and a photobooth. We only got one picture before the smoke machine reduced visibility.
Unlike a lot of ragers I’ve been at, it was easy to start up a conversation with just about anyone. Living expenses are so low in Detroit and artists are flocking to the area. This is who made up most of the group. Fascinating people who are working on a multitude of different projects and have stories of building community on their streets while rehabbing houses that cost $1-2.5k to purchase but didn’t come with most of what you’d assume a house should.
Then the fire dragon showed up
Inside was packed and outside was starting to get crowded. Then the fire dragon showed up. Named Gon KiRin, it’s the collaboration between [Teddy Lo] and [Ryan C. Doyle] who was on Team Detroitus and is artist in residence at Recycle Here!, the build venue for the Red Bull Creation. The beast is built on the frame of a 1960’s dump truck and most of the building materials were found on the sides of the highway. The huge propane tank on the back allows it to breathe fire. I love that three daisy-chained 9-volts and two bare wires are the control mechanism for this. One thing became readily apparent; you don’t stand in front of Gon KiRin while it’s breathing fire.
The crowd piled onto the couches on top of the tail and at either rear hip. The dragons back also bore a continually rotating set of people. After midnight the guests really started to flood in. [Caleb] and I tried to close down the party but a few hours after midnight it didn’t seem to be getting any slower.
Capping off the weekend like this really proves that you need to get your team into next year’s Red Bull Creation. I got in the easy way — judges don’t have to stay up for 72 hours building stuff. Despite the sleep deprivation for contestants I didn’t come across anyone who wasn’t having a blast during the build, while goofing off, or trying to stay awake as this party got moving.
Bravo Detroit, you’re now on my short list of best party towns. Who else wants to be added to that list? Hackaday’s going to be in Las Vegas for DEFCON in a few weeks. Anyone know of parties planned that weekend and how we can get in?
The fire-breather “Gon KiRin”
We only got one picture before the fog machine was turned on
Chris and Mike tried out the Omnicorp Photobooth which prints out your photos
Brian Benchoff trys out the team choice trophy — a modified toddler’s tricycle
[Arman] works in a small prototyping shop, so when a few guys from the local VR group called to ask for help building a non-lethal electric chair, he thought they were joking — until they showed up at the shop! Finally understanding what they really wanted to do, he hooked them up with an EL wire power supply (high voltage AC, low amperage) for their first prototype.



 [Brian] rolled up riding one of the trophies, a modified toddler’s tricycle that proves his future with a travelling circuit is still viable. They roped off the area and set up huge speakers for the DJ. Then two guys game lumbering down the street sharing the work of hauling a tub full of ice and 12-ounce clear glass bottles with colored liquid inside. Turns out they just opened
[Brian] rolled up riding one of the trophies, a modified toddler’s tricycle that proves his future with a travelling circuit is still viable. They roped off the area and set up huge speakers for the DJ. Then two guys game lumbering down the street sharing the work of hauling a tub full of ice and 12-ounce clear glass bottles with colored liquid inside. Turns out they just opened 
























