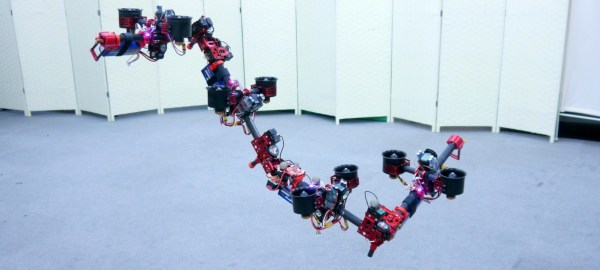
Modern multirotors are very maneuverable but are mostly limited to hovering in a single orientation. [Peter Hall] has gotten around this by building an omnicopter drone with six motors mounted in different orientations on a collapsed tetrahedron frame.
 The shape of the frame consists of six tetrahedrons all joined together at a single point. With a motor in each frame, the drone can produce a thrust vector in any direction, to achieve six degrees of freedom. The control system is the challenging part of this project, but fortunately [Peter] is one of the Ardupilot developers. Unlike a standard multirotor, it doesn’t need to tilt to move around laterally but can keep its orientation constant. One of the limiting factors is that the motors need to stop and reverse rotation for direction changes, which takes time. At slow maneuvering speeds this isn’t a major problem, but at higher speeds rotation is noticeably less smooth.
The shape of the frame consists of six tetrahedrons all joined together at a single point. With a motor in each frame, the drone can produce a thrust vector in any direction, to achieve six degrees of freedom. The control system is the challenging part of this project, but fortunately [Peter] is one of the Ardupilot developers. Unlike a standard multirotor, it doesn’t need to tilt to move around laterally but can keep its orientation constant. One of the limiting factors is that the motors need to stop and reverse rotation for direction changes, which takes time. At slow maneuvering speeds this isn’t a major problem, but at higher speeds rotation is noticeably less smooth.
Because the drone is symmetrical all around, keeping track of orientation is challenging for a human pilot, but it’s perfect for an autopilot system like Ardupilot. In the video after the break, [Peter] demonstrates this by flying the drone around while the autopilot rotates it randomly. The 6DoF control system is open source and a pull request is live to integrate it into the official version of Ardupilot. The obvious application for this sort of drone is for inspection in and around structures.
This omnicopter is an entry into the Lynchpin drone competition by the celebrity [Terrence Howard]. We’re not quite following his claims regarding the scientific significance of this shape, which he named the “Lynchpin”, but it works for drones. Continue reading “Six Degrees Of Freedom Omnicopter With Ardupilot”