What do you do when you have to disinfect an entire warehouse? You could send a group of people through the place with UV-C lamps, but that would take a long time as said humans cannot be in the same area as the UV-C radiation, as much as they may like the smell of BBQ chicken. Constantly repositioning the lamps or installing countless lamps would get in the way during normal operation. The answer is to strap UV-C lights to a robot according to MIT’s CSAIL, and have it ride around the space.
As can be seen in the video (also embedded after the break), a CSAIL group has been working with telepresence robotics company Ava Robotics and the Greater Boston Food Bank (GBFB). Their goal was to create a robotic system that could autonomously disinfect a GBFB warehouse using UV-C without exposing any humans to the harmful radiation. While the robotics can be controlled remotely, they can also map the space and navigate between waypoints.
While testing the system, the team used a UV-C dosimeter to confirm the effectiveness of this setup. With the robot driving along at a leisurely 0.22 miles per hour (~0.35 kilometer per hour), it was able to cover approximately 4,000 square feet (~372 square meter) in about half an hour. They estimated that about 90% of viruses like SARS-CoV-2 could be neutralized this way.
During trial runs, they discovered the need to have the robot adapt to the constantly changing layout of the warehouse, including which aisles require which UV-C depending on how full they are. Having multiple of these robots in the same space coordinate with each other would also be a useful feature addition.
What has dual compressed-air cannons, 500 roll-on deodorant balls, and a machine-learning brain with a bad attitude? We didn’t know either, until [Leo Fernekes] dropped this video on his autonomous robot sentry gun and saw it in action for ourselves.
Now, we’ve seen tons of sentry guns on these pages before, shooting everything from water to various forms of Nerf. And plenty of those builds have used some form of machine vision to aim the gun onto the target. So while it might appear that [Leo]’s plowing old ground here, this build is chock full of interesting tips and tricks.
It started when [Leo] saw a video on TensorFlow basics from our friend [Edje Electronics], which gave him the boost needed to jump into an AI project. The controller he ended up with looks for humans in the scene and slews the turret onto target, where the air cannons can do their thing. The hefty ammo is propelled by compressed air, which is dumped into the chamber using a solenoid valve with an interesting driver that maximizes the speed at which it opens. Style points go to the bacteriophage T4-inspired design, and to the sequence starting at 1:34 which reminded us of the factory scene from RoboCop.
[Leo] really put a ton of work into this project, and the results show. He is hoping to get an art gallery or museum to show it as an interactive piece to comment on one possible robot-human future, presumably after getting guests to sign a release. Whatever happens to it, the robot looks great and [Leo] learned a lot from it, as did we.
Telecommuters: tired of the constant embarrassment of showing up to video conferences wearing nothing but your underwear? Save the humiliation and all those pesky trips down to HR with Safe Meeting, the new system that uses the power of artificial intelligence to turn off your camera if you forget that casual Friday isn’t supposed to be that casual.
The following infomercial is brought to you by [Nick Bild], who says the whole thing is tongue-in-cheek but we sense a certain degree of “necessity is the mother of invention” here. It’s true that the sudden throng of remote-work newbies certainly increases the chance of videoconference mishaps and the resulting mortification, so whatever the impetus, Safe Meeting seems like a great idea. It uses a Pi cam connected to a Jetson Nano to capture images of you during videoconferences, which are conducted over another camera. The stream is classified by a convolutional neural net (CNN) that determines whether it can see your underwear. If it can, it makes a REST API call to the conferencing app to turn off the camera. The video below shows it in action, and that it douses the camera quickly enough to spare your modesty.
Ever since we first saw the nightmarish artwork produced by Google DeepDream and the ridiculous faux paintings produced from neural style transfer, we’ve been aware of the ways machine learning can be applied to visual art. With commercially available trained models and automated pipelines for generating images from relatively small training sets, it’s now possible for developers without theoretical knowledge of machine learning to easily generate images, provided they have sufficient access to GPUs. Filmmaker [Kira Bursky] took this a step further, creating a surreal short film that features characters and textures produced from image sets.
She began with about 150 photos of her face, 200 photos of film locations, 4600 photos of past film productions, and 100 drawings as the main datasets.
via [Kira Bursky]Using GAN models for nebulas, faces, and skyscrapers in RunwayML, she found the results from training her face set disintegrated, realistic, and painterly. Many of the images continue to evoke aspects of her original face with distortions, although whether that is the model identifying a feature common to skyscrapers and faces or our own bias towards facial recognition is up to the viewer.
On the other hand, the results of training the film set photos on models of faces and bedrooms produced abstract textures and “surreal and eerie faces like a fever dream”. Perhaps, unlike the familiar anchors of facial features, it’s the lack of recognizable characteristics in the transformed images that gives them such a surreal feel.
[Kira] certainly uses these results to her advantage, brainstorming a concept for a short film that revolves around her main character experiencing nightmares. Although her objective was to use her results to convey a series of emotionally striking scenes, the models she uses to produce these scenes are also quite interesting.
She started off by using the MiDaS model, created by a team of researchers from ETH Zurich and Intel, for generating monocular depth maps. The results associated levels inside of an image with their appropriate depth in relation to one another. She also used the MASK R-CNN for masking out the backgrounds in generated faces and combined her generated images in Photoshop to create the main character for her short film.
via [Vox]In order to simulate the character walking, she used the Liquid Warping GAN, a framework for human motion imitation and appearance transfer, created by a team from ShanghaiTech University and Tencent AI Lab. This allowed her to take her original images and synthesize results from reference poses of herself going through the motions of walking by using a 3D body mesh recovery module. Later on, she applied similar techniques for motion tracking on her faces, running them through the First Order Motion Model to simulate different emotions. She went on to join her facial movements with her character using After Effects.
Bringing the results together, she animated a 3D camera blur using the depth map videos to create a less disorienting result by providing anchor points for the viewers and creating a displacement map to heighten the sense of depth and movement within the scenes. In After Effects, she also overlaid dust and film grain effects to give the final result a crisper look. The result is a surprisingly cinematic film entirely made of images and videos generated from machine learning models. With the help of the depth adjustments, it almost looks like something that you might see in a nightmare.
Modern physics experiments are often complex, ambitious, and costly. The times where scientific progress could be made by conducting a small tabletop experiment in your lab are mostly over. Especially, in fields like astrophysics or particle physics, you need huge telescopes, expensive satellite missions, or giant colliders run by international collaborations with hundreds or thousands of participants. To drive this point home: the largest machine ever built by humankind is the Large Hadron Collider (LHC). You won’t be surprised to hear that even just managing the data it produces is a super-sized task.
Since its start in 2008, the LHC at CERN has received several upgrades to stay at the cutting edge of technology. Currently, the machine is in its second long shutdown and being prepared to restart in May 2021. One of the improvements of Run 3 will be to deliver particle collisions at a higher rate, quantified by the so-called luminosity. This enables experiments to gather more statistics and to better study rare processes. At the end of 2024, the LHC will be upgraded to the High-Luminosity LHC which will deliver an increased luminosity by up to a factor of 10 beyond the LHC’s original design value.
Currently, the major experiments ALICE, ATLAS, CMS, and LHCb are preparing themselves to cope with the expected data rates in the range of Terabytes per second. It is a perfect time to look into more detail at the data acquisition, storage, and analysis of modern high-energy physics experiments. Continue reading “Crunching Giant Data From The Large Hadron Collider”→
When it comes to machine learning algorithms, one’s thoughts do not naturally flow to the 6502, the processor that powered some of the machines in the first wave of the PC revolution. And one definitely does not think of gesture recognition running on a homebrew breadboard version of a 6502 machine, and yet that’s exactly what [Nick Bild] has accomplished.
Before anyone gets too worked up in the comments, we realize that [Nick]’s Vectron breadboard computer is getting a lot of help from other, more modern machines. He’s got a pair of Raspberry Pi 3s in the mix, one to capture and downscale images from a Pi cam, and one that interfaces to an Atari 2600 emulator and sends keypresses to control games based on the gestures seen by the camera. But the logic to convert gesture to control signals is all Vectron, and uses a k-nearest neighbor algorithm executed in 6502 assembly. Fifty gesture images are stored in ROM and act as references for the four known gesture classes: up, down, left, and right. When a match between the camera image and a gesture class is found, the corresponding keypress is sent to the game. The video below shows that the whole thing is pretty responsive.
In our original article on [Nick]’s Vectron breadboard computer, [Tom Nardi] said that “You won’t be playing Prince of Persia on it.” That may be true, but a machine learning system running on the Vectron is not too shabby either.
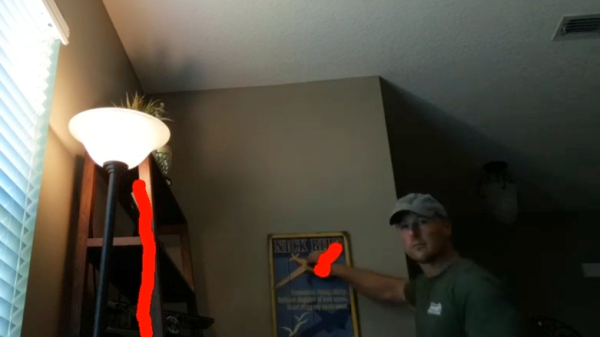
Can you remember everything you’ve touched in a given day? If you’re being honest, the answer is, “Probably not.” We humans are a tactile species, with an outsized proportion of both our motor and sensory nerves sent directly to our hands. We interact with the world through our hands, and unfortunately that may mean inadvertently spreading disease.
[Nick Bild] has a potential solution: a machine-vision system called Deep Clean, which monitors a scene and records anything in it that has been touched. [Nick]’s system uses Jetson Xavier and a stereo camera to detect depth in a scene; he built his camera from a pair of Raspberry Pi cams and a Pi 3B+, but other depth cameras like a Kinect could probably do the job. The idea is to watch the scene for human hands — OpenPose is the tool he chose for that job — and correlate their depth in the scene with the depth of objects. Touch a doorknob or a light switch, and a marker is left on the scene. The idea would be that a cleaning crew would be able to look at the scene to determine which areas need extra attention. We can think of plenty of applications that extend beyond the current crisis, as the ability to map areas that have been touched seems to be generally useful.
[Nick] has been getting some mileage out of that Xavier lately — he’s used it to build an AI umpire and shades that help you find lost stuff. Who knows what else he’ll find to do with them during this time of confinement?