Robotic safety standards are designed for commercial bots, but amateur robot builders should also consider ideas like the keepout zone where a mobile robot isn’t permitted to go or how to draw out the safety perimeter space for your experimental robot arm. After all, that robot arm won’t stop crushing your fingers because you built it yourself. So, it is worth looking at the standards for industrial robots, even if your aim is fun rather than profit.
The basics of this for fixed robots like robot arms are defined in the standard R15-06. You don’t need to read the full text (because it costs $325 and is *incredibly* tedious to read), but the Association for Advancing Automation has a good background on the details. The bottom line is to ensure that a user can’t reach into an area that the robot arm might move to and provide a quick and easy way to disable the motors if someone does reach in.
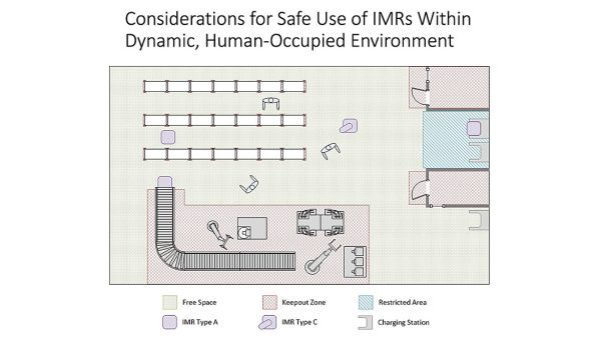
Robots that move, called Industrial Mobile Robots (IMRs) or Autonomous Mobile Robots (AMRs) bring in a whole new set of problems, though, because they are designed to move around under their own control and often share space with humans. For them, the standard is called R15.08. The AGV network has a good guide to the details, but again, it boils down to two things: make sure the robot is keeping an eye on its surroundings and that it can stop quickly enough to avoid injury.