[Maurizio] built a robot arm, which is always a great accomplishment. But his project includes a very cool touch interface for an Android device that sets it apart from many other similar projects.You can see a very fast summary of the construction in the video below.
The design uses Fusion 360 and there are good explanations of each step in the process. The gripper is adapted from an existing design. Various 3D printed parts make up the wrist, shoulder, elbow, and rotating base.
It started with [CHORL] making a promise to himself regarding constructing a new combat robot: no spending of money on the new robot.
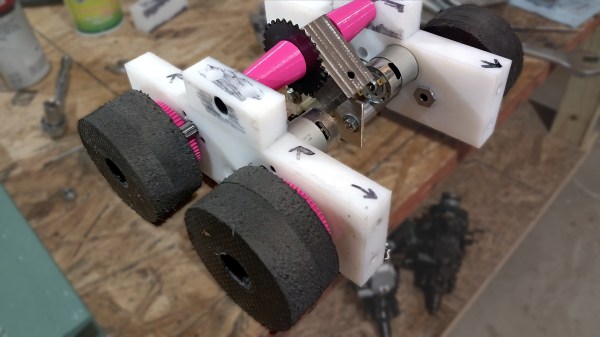
That rule was violated (but only a little) by making his robot’s wheels out of EVA kneeling pads. EVA (Ethylene-Vinyl Acetate) is a closed-cell foam that makes for durable yoga mats, kneeling pads, and products of a similar nature. [CHORL] found a way to turn them into light but serviceable wheels for his robot: the Susquehanna Boxcar.
Nested hole saws create concentric holes. Perfect for wheels.
Here’s how the wheels were made: [CHORL] began with two hole saws. Nesting a smaller hole saw into a larger one by putting both on the same arbor created a saw with two holes, both of which were centered with respect to one another. The only problem was that this hole saw was not actually deep enough to cut completely through the thick foam. Luckily, cutting roughly halfway through on one side, then flipping the sheet over and cutting through from the other side was a good workaround. That took care of turning the thick foam sheet into round wheels.
A 3D-printed part served as a wheel hub as well as gear for the drivetrain. We want to call attention to the clever method of reinforcing the connection between the parts. [CHORL] didn’t want to just glue the geared hub directly to the surface of the foam wheel, because he suspected it might separate under stress. To address this, he designed six slots into the hub, cut matching slots into the foam wheel, and inserted six spline-like reinforcements in the form of some ABS strips he had on hand. Gluing it all together with E-6000 and leaving it to cure overnight under a weight resulted in a geared wheel assembly that [CHORL] judged to be about as round and rigid as a wheel should be, so the robot had a solution for nice light wheels that were, above all, cheap!
Lots of robots need wheels, and unsurprisingly, DIY solutions are common projects. [CHORL]’s approach here looks pretty scalable, as long as one can cut some accurate holes.
Interested in knowing more about the robot these wheels are destined for? [CHORL]’s still working on the Susquehanna Boxcar, but it’s almost done, and you can read a bit more about it (and see a few more pictures) here.
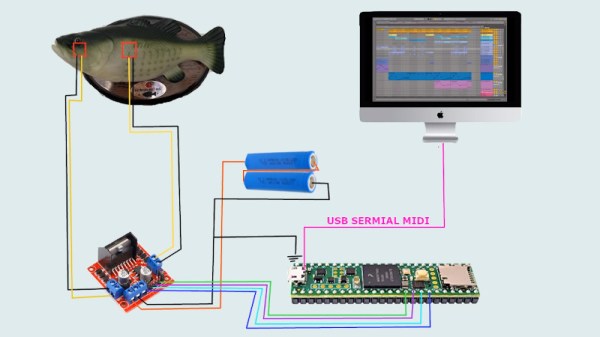
The Big Mouth Billy Bass and other singing fish were a scourge first delivered to us in the late 90s. [Kevin Heckart] has been teaching them to sing new songs without the tinny sound quality and hokey folk tunes. For this, he must be applauded.
A Teensy 4.1 or Teensy 3.2 is used to power [Kevin]’s various singing fish builds. There are two motors inside a singing fish, typically — one motor to pivot the fish’s body, and one to open and close the mouth. Hook these up to a motor driver, and command that with the Teensy, and you’re up and running. To sync the fish with the music, MIDI data is sent to the Teensy over USB. The Teensy takes in note data and uses this to command the motors to make the fish appear to sing along.
The tutorial linked above is a great way to learn how the hack was achieved. However, the real money is in the performance. A video of [Kevin]’s fishy chorus performing the famous Wellerman sea shanty has over 50 million views on YouTube and he’s collected over 26 million likes on Tiktok.
Sometimes the simple hacks are the ones that bring the most joy. Video after the break.
Four DC gear-motors are fitted to a metal chassis, each one driving a mecanum wheel. These are special wheels with rollers fitted around their circumference at an angle that allows the robot to move in all directions and rotate in various ways depending on how each wheel is driven.
On top of this highly maneuverable chassis is placed a 5-degree-of-freedom robotic arm. The robot also gets a ultrasonic sensor for avoiding objects, as well as a camera for line-following duties. The camera also allows the robot to pick up blocks and identify their color, and it can then sort them into boxes. It’s all powered by a Raspberry Pi, running a bunch of Python code to make everything happen.
How can a few grams of battery, geared motor, and some nifty materials get a jumping robot over 30 meters into the air? It wasn’t by copying a grasshopper, kangaroo, or an easily scared kitty. How was it done, then?
It’s been observed that of all the things that are possible in nature, out of all the wonderful mechanisms, fluid and aerodynamics, and chemistry, there’s one thing that is so far undiscovered in a living thing: continuous rotation. Yes, that’s right, the simple act of going roundy-round is unique to mechanical devices rather than biological organisms. And when it comes to jumping robots, biomimicry can only go so far.
With this distinct mechanical advantage in mind, [Elliot Hawkes] of the University of California Santa Barbara decided to look beyond biomimicry. As explained in the paper in Nature and demonstrated in the video below the break, the jumping robot being considered uses rubber bands, carbon fiber bows, and commodity items such as a geared motor and LiPo batteries to essentially wind up the spring mechanism and then, like a trap being sprung, release the pent up energy all at once. The result? The little jumper can go almost 100 feet into the air. Be sure to check it out!
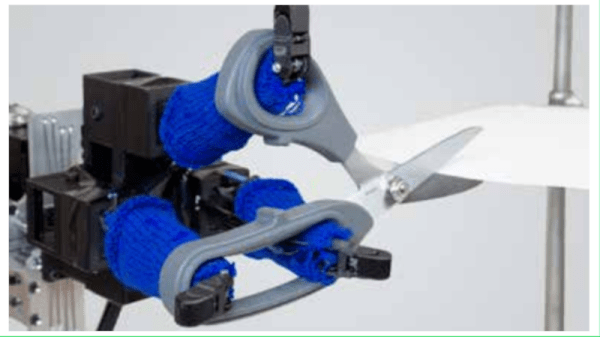
MIT complains that designing a robot hand is time-consuming and takes a lot of iterations. They want to improve that using a unique approach by giving a modular hand tactile sensors. They claim this can reduce the design time down to minutes for many practical applications. For example, cutting paper. You can see a video about the paper below as well as read the text itself.
Each style of manipulator has an associated graph. Predefined elements let you assemble a palm and specialized fingers. You deform the fingers to match the use of the hand. Then a sensor that looks like a mitten provides feedback fo the task.
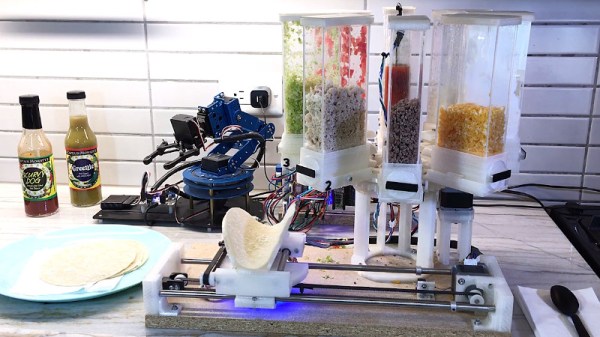
We’re big fans of useless machines here at Hackaday, there’s something undeniably entertaining about watching a gadget flail about dramatically without actually making any progress towards a defined goal. But what happens when one of these meme machines ends up working too well? We think that’s just what we might be witnessing here with the Tacobot from [Vije Miller].
On the surface, building an elaborate robotic contraption to (slowly) produce tacos is patently ridiculous. Doubly so when you tack on the need to give it voice commands like it’s some kind of one-dish version of the Star Trek food replicator. The whole thing sounds like the setup for a joke, an assumption that’s only reinforced after watching the dramatized video at the break. But in the end, we still can’t get over how well the thing appears to work.
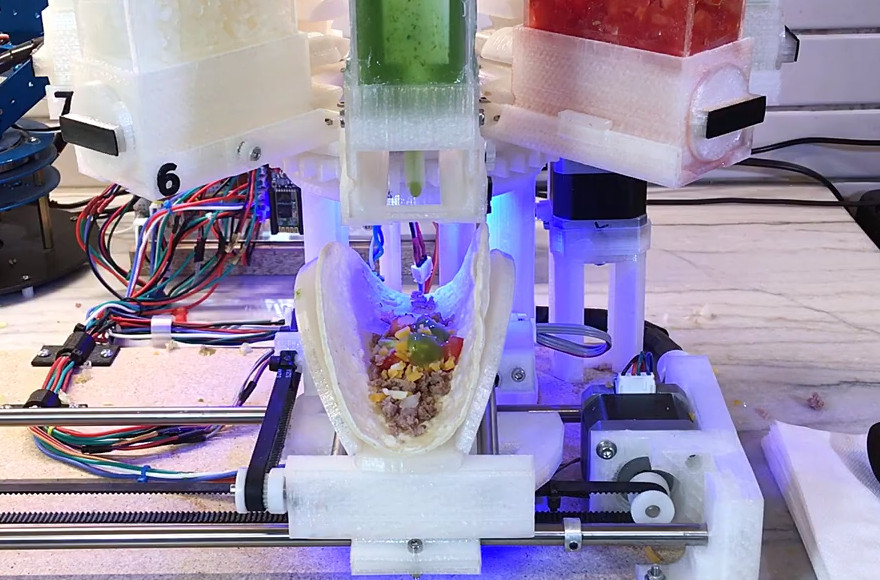
After [Vije] gives it a list of ingredients to dispense, a robotic arm drops a tortilla on a fantastically articulated rotating platform that can not only spin and move in two dimensions, but can form the soft shell into the appropriate taco configuration. The empty shell is then brought under a rotating dispenser that doles out (or at least attempts to) the requested ingredients such as beef, onions, cheese, and lettuce. With a final flourish, it squirts out a few pumps of the selected sauce, and then presents the completed taco to the user.
The only failing appears to be the machine’s ability to dispense some of the ingredients. The ground beef seems to drop into place without issue, but it visibly struggles with the wetter foodstuffs such as the tomatoes and onions. All we know is that if a robot handed us a taco with that little lettuce on it, we’d have a problem. On the project page [Vije] acknowledges the issue, and says that a redesigned dispenser could help alleviate some of the problem.
The issue immediately brought to mind the fascinating series of posts dedicated to handling bulk material penned by our very own [Anne Ogborn]. While the application here might be a bit tongue-in-cheek, it’s still a perfect example of the interesting phenomena that you run into when trying to meter out different types of materials.