There’s nothing like a little weekend project, especially one that ends up better than you expected. And when you literally build a robotic arm out of workshop scraps, so much the better.
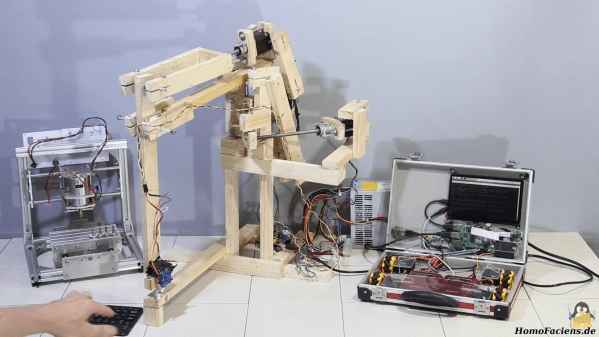
Longtime readers will no doubt recognize the build style used here as that of [Norbert Heinz], aka “Homofaciens” on YouTube. [Norbert] has a way of making trash do his bidding, and has shown us all kinds of seemingly impossible feats of mechatronics with just what’s lying around. In this case, his robot arm is made from scrap wooden roofing battens, or what we’d call furring strips here in the US. The softwood isn’t something you’d think would make a great material for building robots, but [Norbert] makes its characteristics work for him, like using wax-lubricated holes for hinge points. Steppers and lead screws cannibalized from an old CNC build, along with the drive electronics, provide the motion. It’s a bit — compliant — but precise enough to pick up nuts and stack them nicely. The video below gives an overview of the build, and detailed instructions are available too.
We always appreciated [Norbert]’s minimalist builds, and seeing what can be accomplished with almost nothing is always inspirational. If you’re not familiar with his work, check out his cardboard and paperclip CNC plotter, his tin can encoders, or his plasma-powered printer.