The modern home is filled with plenty of “smart” devices, but unfortunately, they don’t always speak the same language. The coffee maker and the TV might both be able to talk to your phone through their respective apps, but that doesn’t necessarily mean the two appliances can work together to better coordinate your morning routine. Which is a shame, since if more of these devices could communicate with each other, we’d be a lot closer to living that Jetsons life we were promised.
Luckily, as hardware hackers we can help get our devices better acquainted with one another. A recent post by [MyHomeThings] shows how the ESP8266 can bridge the gap between a Roomba and Amazon’s Alexa assistant. This not only allows you to cheaply and easily add voice control to the robotic vacuum, but makes it compatible with the Amazon’s popular home automation framework. This makes it possible to chain devices together into complex conditional routines, such as turning off the lights and activating the vacuum at a certain time each night.
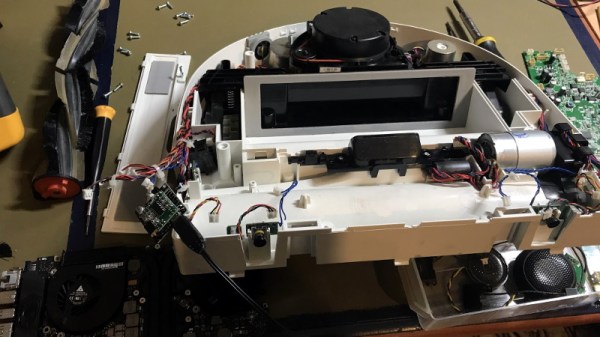
 The hack depends on the so-called Roomba Open Interface, a seven pin Mini-DIN connector that can be accessed by partially disassembling the bot. This connector provides power from the Roomba’s onboard batteries as well as a two-way serial communications bus to the controller.
The hack depends on the so-called Roomba Open Interface, a seven pin Mini-DIN connector that can be accessed by partially disassembling the bot. This connector provides power from the Roomba’s onboard batteries as well as a two-way serial communications bus to the controller.
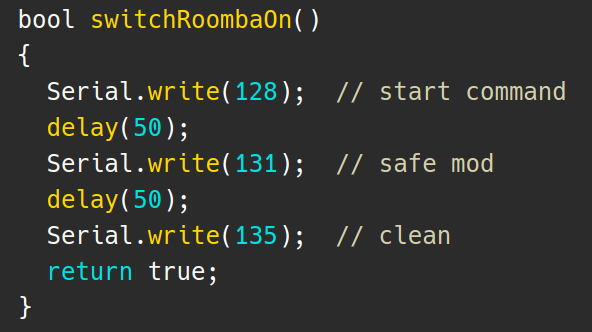
By connecting a MP1584EN DC-DC converter and ESP8266 to this connector, it’s possible to send commands directly to the hardware. Add a little glue code to combine this capability with a library that emulates a Belkin Wemo device, and now Alexa is able to stop and start the robot at will.
We’ve seen this sort of trick used a few times before to add backdoor Alexa support to various gadgets, and it’s always interesting to see what kind of unusual hardware folks are looking to make an integral part of their smart home.