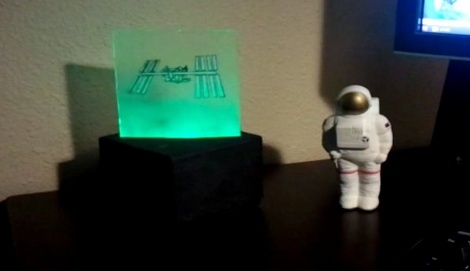
[Nathan Bergey] came up with a really neat desk lamp that provides a visualization of when the International Space Station is overhead.
The lamp uses a Teensy board to light a few LEDs on the edge of a piece of plexiglass. Because the orbit of the ISS decays over time, the time that overhead passes will occur is unpredictable after a few months. A stand-alone satellite tracking lamp will eventually lose it’s accuracy, so [Nathan] needed to parse tracking data the internet. Since he couldn’t find an API to track the ISS, [Nathan] wrote a Python script to parse the data he found on Heavens Above. Everything on the computer runs in the Gnome panel and is passed to the Teensy over the USB connection. [Nathan] posted all of the code is posted on github.
It’s a really great build that provides a reminder that there are people in space, and we think this would be a great way to provide some notification of upcoming Iridium flares, or when it’s most likely to pick up some APRS packets.
Check out [Nathan]’s demo of his ISS lamp after the break.