Autonomous vehicles make a regular appearance around here, as does [Daniel Riley] aka [rctestflight]. His fascination with building long-endurance autonomous vehicles continues, and this time he built an autonomous air boat.
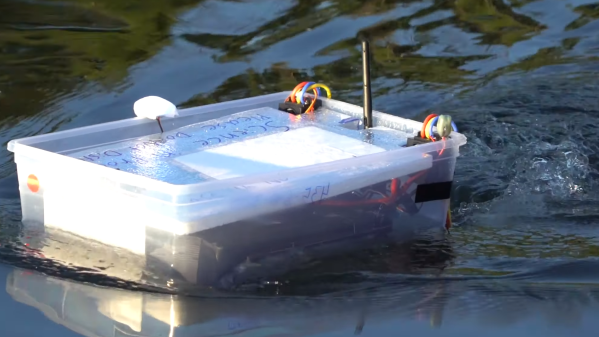
This craft incorporates a lot of the lessons learnt from his autonomous boat that used a plastic food container. One of the biggest issues was the submerged propellers kept getting tangled in weeds. This led [Daniel] to move his props above water, sacrificing some efficiency for reliability, and turning it into an air boat. The boat itself is catamaran design with separate 3D printed hulls connected by carbon fibre tubes. As with the tupperware boat, autonomous control is done by the open source Ardupilot software.
During testing [Daniel] had another run in with his old arch-nemesis, seaweed. It turns out the sharp vertical bow is a nice edge for weeds to hook on to, create drag, and screw up the craft’s control. [Daniel]’s workaround involved moving the big batteries to the rear, causing the bows lift almost completely out of the water.
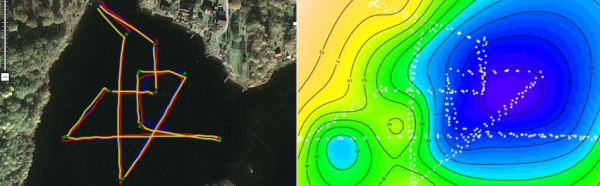
With a long endurance in mind right from the start of the project, [Daniel] put it to the test with a 13 km mission on Lake Washington very early one morning. For most of the mission the boat was completely on its own, with [Daniel] stopping at various points along the lake shore to check on its progress. Everything went smoothly until 10 km into the mission when the telemetry showed it slowing down and angling off course, after which is started going in circles. Lucky for Daniel he was offered a kayak by a lakeside resident, and he managed to recover the half sunken vessel. He suspects the cause of the failure was a slowly leaking hull. [Daniel] is already working on the next version, and were looking forward to seeing what he comes up with. Check out the video after the break. Continue reading “Autonomous Air Boat Vs Lake Washington”