Though [Ivan Miranda] calls the 3D printed vehicle in his recent video a motorbike, what he ultimately pulls out of his suitcase is clearly a scooter. Linguistic confusion aside, the “Mirandetta” looks like an awesome build and pulling a scooter out of your suitcase and whizzing past everyone in the taxi line just sounds amazing, especially knowing you made it yourself.
Aside from a whole lot of filament, he’s got a couple of tool batteries for hot-swappable energy that Airport security shouldn’t mind too much — provided you carry them with you, anyway — plus the usual e-bike motor and electronic speed control you might expect, and lawnmower tires which you might not. The narrow 3D printed rims round over the normally-flat tires to make them usable for this application. He seems particularly taken with the bi-stable mechanism he built for the kickstand, and we can’t blame him as we love seeing that kind of thing ourselves. The TPU seat is also a nice touch to keep with ‘everything printed’ vibe.
Now while the finished product does indeed fit into his suitcase, it needs to be completely disassembled. Well, unless you have an over-sized suitcase, perhaps. So our dreams of zooming away from the luggage line from the first paragraph were perhaps a bit premature. Still, from the footage at Prague Maker Faire at the end of the video, it looks like it was a fun enough ride that we can forgive [Ivan] for our overactive imaginations.
If you want an open-source e-bike, we’ve seen those too — but that won’t fit in any kind of suitcase.
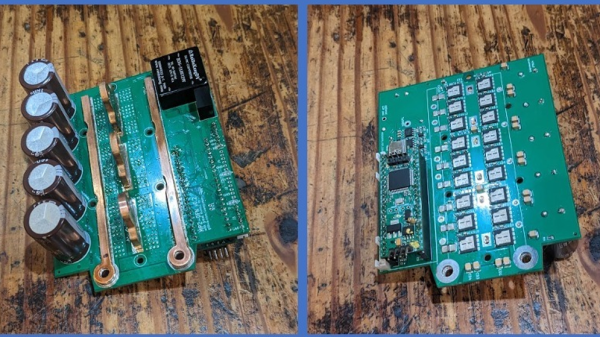
Sometimes, a little puny matchbox-sized electronic speed controller (ESC) won’t do the job. If you find yourself looking for something heftier, say, in the range of hundreds of amps, you might look towards a design like the MP2 ESC. [owhite] has built an example of the design that can deliver some serious power.
[owhite’s] build has some serious specs: it’s rated to offer up to 300 amps at up to 150 volts, though thus far, it’s only been tested at up to 100 V. Like the original MP2, which hails from the Endless Sphere forums, it’s designed to be compatible with VESC code using the STM32F405 microcontroller. It’s intended for driving high-powered traction motors in applications like e-bikes and electric scooters, as you might have guessed by its potential output power being well into the tens of kilowatts range.
If you’re eager to build your own, you can do so, with the design files on GitHub. Just note that you’ll need some hefty parts to handle the juice, including beefy MOSFETS and juicy capacitors rated at 160 V.
Personal Electric Vehicles (PEVs) all contain the same basic set of parts: a motor, a battery, a motor controller, some sensors, and a display to parse the information. This simplicity allowed [casainho] to develop a custom controller setup for their own PEVs.
Built around the venerable VESC motor controller, [casainho]’s addition is the EBike/EScooter board that interfaces the existing motor of a device to the controller. Their ESP32-powered CircuitPython solution takes the sensor output of a given bike or scooter (throttle, cadence, or torque) and translates it into the inputs the controller uses to set the motor power.
They’ve also designed an ESP32-based display to interface the rest of the system to the user while riding. Since it also runs CircuitPython, it’s easy to reconfigure the functions of the three button device to display whatever you’d like as well as change various drive modes of your system. I know I’d love to see my own ebikes have a different mode for riding on road versus on shared paths since not getting run over by cars and not harassing pedestrians aren’t going to have the same power profile.
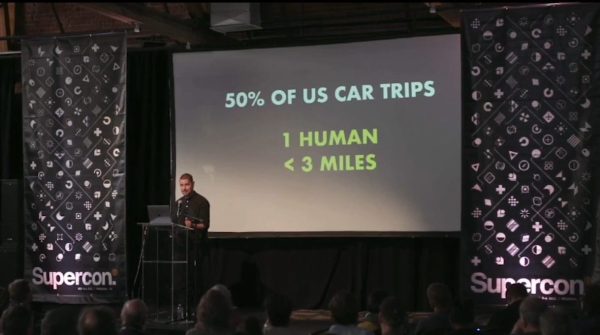
During the 20th Century, much of the western world decided that motor vehicles were the only desirable form of transportation. We built our cities to accommodate cars through parking, stop lights, and any number of other infrastructure investments so that you could go get milk and bread in style. In the US, 50% of automobile trips are less than three miles and have only one occupant. [Bradley Gawthrop] asked if there might be a more efficient way to do all this? Enter the Personal Electric Vehicle (PEV).
What Are PEVs?
PEVs are a nascent part of the transportation mix that fall under the wider umbrella of “micromobility,” including scooters, bikes, skateboards, and the like. The key differentiator here is that they are at least partially electrically-driven. [Gawthrop] walks us through several of the different types during his Supercon 2022 talk, but since they are all small, electric powered devices for transporting one or two people, they can trace their lineage back to the infamous Segway Human Transporter.
Using an electric motor or two connected to a controller and batteries, the overall system complexity for any of these devices is quite low and ripe for the hacking. Given the right tools and safety precautions, anyone should be able to crack a PEV open and repair or tinker with it. As with many things in life, the real story is more complicated.
As [Gawthrop] notes, many a hacker has said, “I wish I’d been able to be involved in X before…” where X equals some technology like home automation and it’s before it got creepy or dystopian in some manner. He exhorts us that the time to be in on the ground floor with PEVs is now. Continue reading “Supercon 2022: Bradley Gawthrop Wants You To Join The PEV Revolution”→
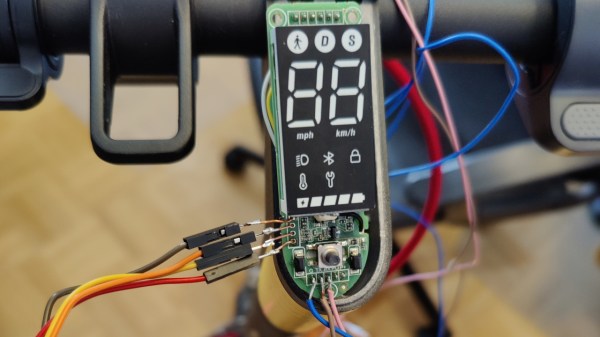
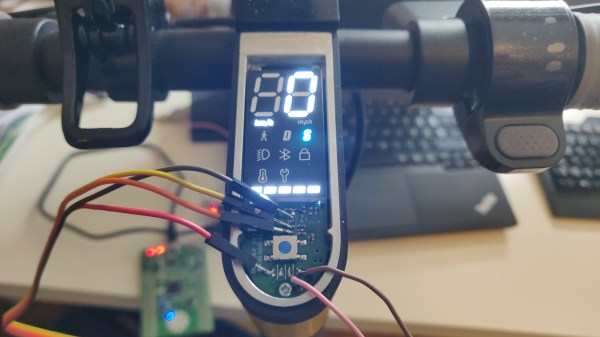
Scooter hacking is wonderful – you get to create a better scooter from a pre-made scooter platform, and sometimes you can do that purely through firmware modifications. Typically, hackers have been uploading firmware using Bluetooth OTA methods, and at some point, we’ve seen the always-popular Xiaomi scooters starting to get locked down. Today, we see [Daljeet Nandha] from [RoboCoffee] continue the research of the new Xiaomi scooter realities, where he finds that SWD flashing is way more of a viable avenue that we might’ve expected. Continue reading “Xiaomi Scooter Firmware Hacking Gets Hands-On”→
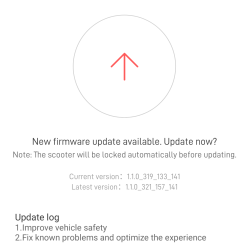
[Daljeet Nandha] from [RoboCoffee] writes to us, sharing his research on cryptographic signature-based firmware authenticity checks recently added to the Xiaomi Mi scooter firmware. Those scooters use an OTA firmware update mechanism over BLE, so you can update your scooter using nothing but a smartphone app – great because you can easily get all the good new features, but suboptimal because you can easily get all the bad new features. As an owner of a Mi 1S scooter but a hacker first and foremost, [Daljeet] set up a HTTPS proxy and captured the firmware files that the app downloaded from Xiaomi servers, dug into them, and summarized what he found.
Confirming this update will indefinitely lock you out of any third-party OTA updates
Unlike many of the security measures we’ve seen lacking-by-design, this one secures the OTA firmware updates with what we would consider the industry standard – SHA256 hash with elliptic cryptography-backed signing. As soon as the first firmware version implementing signature checks is flashed into your scooter, it won’t accept anything except further firmware binaries that come with Xiaomi’s digital signature. Unless a flaw is found in the signature checking implementation, the “flash a custom firmware with a smartphone app” route no longer seems to be a viable pathway for modding your scooter in ways Xiaomi doesn’t approve of.
Having disassembled the code currently available, [Daljeet] tells us about all of this – and more. In his extensive writeup, he shares scripts he used on his exploration journey, so that any sufficiently motivated hacker can follow in his footsteps, and we highly recommend you take a look at everything he’s shared. He also gives further insights, explaining some constraints of the OTA update process and pointing out a few security-related assumptions made by Xiaomi, worth checking for bypassing the security implemented. Then, he points out the firmware filenames hinting that, in the future, the ESC (Electronic Speed Control, responsible for driving the motors) board firmware might be encrypted with the same kind of elliptic curve cryptography, and finds a few update hooks in the decompiled code that could enable exactly that in future firmware releases.
One could argue that these scooters are typically modified to remove speed limits, installed there because of legal limitations in a variety of countries. However, the legal speed limits are more nuanced than a hard upper boundary, and if the hardware is capable of doing 35km/h, you shouldn’t be at mercy of Xiaomi to be able to use your scooter to its full extent where considerate. It would be fair to assert, however, that Xiaomi did this because they don’t want to have their reputation be anywhere near “maker of scooters that people can modify to break laws with”, and therefore we can’t expect them to be forthcoming.
So we’re two plus years into the pandemic at this point. Are you still working from home in the most comfortable clothes ever sewn? We figure that of the lot of you who said goodbye to that drab, tiled carpet in 2020, most have probably heard rumblings about returning to the office. And probably a good portion have at least been forced into a hybrid schedule.
Lots of companies would love to see their employees once again milling about all those glass and steel observation tanks office buildings they pay so much for. And while some are likely just forcing employees to come back, others are offering incentives, such as Google. The tech giant recently partnered with electric scooter manufacturer Unagi to provide a “Ride Scoot” program designed to lure many of Google’s US-based employees back to those brightly-colored code playgrounds they call offices with a fun mode of private transportation. The plan is to offer a full reimbursement of the monthly subscription fee for Unagi’s Model One folding scooter, which retails for $990.
The subscription is normally $49 a month plus a one-time $50 sign-up fee, but this amount will be slightly discounted (and waived) for eligible Google employees. There is one caveat to the system: an employee must use the scooter for a minimum of nine commutes to the office per month, although Google says they’re gonna be a bro about it and use the honor system.