2017, in case you don’t remember, was a terrible year for the Caribbean and Gulf coast. Hurricane Maria tore Puerto Rico apart, Harvey flooded Houston, Irma destroyed the Florida Keys, and we still haven’t heard anything from Saint Martin. There is, obviously, a problem to be solved here, and that problem is communications. Amateur radio only gets you so far, but for their Hackaday Prize entry, [Inventive Prototypes] is building an emergency communication system that anyone can use. It only needs a clear view of the sky, and you can use it to send SMS messages. It’s the PR-Holonet, and it’s something that’s already desperately needed.
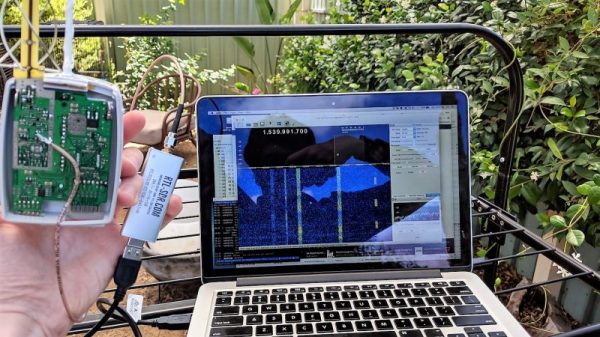
The basis for the PR-Holonet is built around an Iridium satellite modem. To date, satellite communication is the best way to get a message out to the world without any infrastructure. It’ll work in the middle of the Sahara, the depths of the Amazon, and conveniently anywhere that was just hit by a category five hurricane.
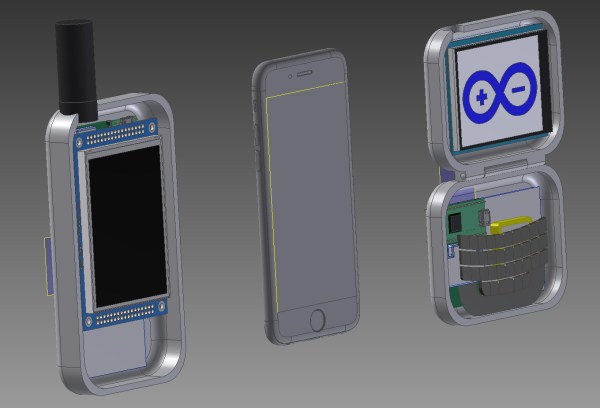
Along with the Iridium modem, [Inventive Prototypes] is using standard, off-the-shelf equipment to turn that connection to a satellite network into something any smartphone can use. That means pulling out a Raspberry Pi, of course. But building a project for areas that were recently ravaged by hurricanes is no easy task. The enclosure it the key here, and [Inventive Prototypes] is using some great water-resistant, dust-proof junction boxes, solar panels, and a whole bunch of batteries to keep everything humming along. It’s a great project and something that was desperately needed a year ago.