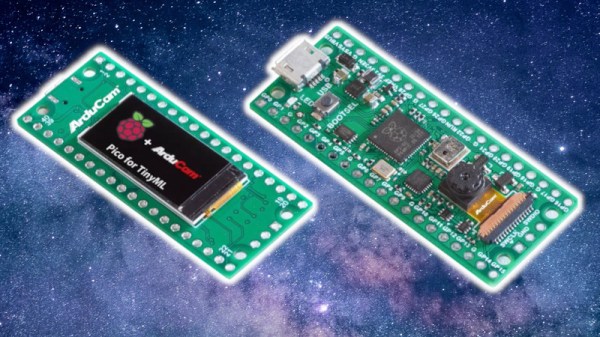
Machine learning (ML) typically conjures up ideas of fancy code requiring oodles of storage and tons of processing power. However, there are some ML models that, once trained, can readily be run on much more spartan hardware – even a microcontroller! The RP2040, star of the Raspberry Pi Pico, is one such chip up to the task, and [Arducam] have announced a board aiming to employ it to those ends – the Pico4ML.
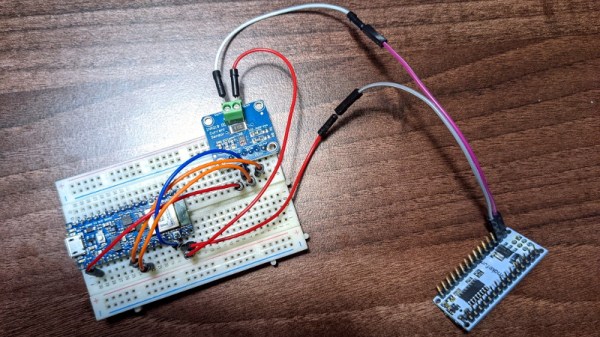
The board goes heavy on the hardware, equipping the RP2040 with plenty of tools useful for machine learning tasks. There’s a QVGA camera on board, as well as a tiny 0.96″ TFT display. The camera feed can even be streamed live to the screen if so desired. There’s also a microphone to capture audio and an IMU, already baked into the board. This puts object, speech, and gesture recognition well within the purview of the Pico4ML.
Running ML models on a board like the Pico4ML isn’t about robust high performance situations. Instead, it’s intended for applications where low power and portability are key. If you’ve got some ideas on what the Pico4ML could do and do well, sound off in the comments. We’d probably hook it up to a network so we could have it automatically place an order when we yell out for pizza. We’ve covered machine learning on microcontrollers before, too – with a great Remoticon talk on how to get started!