
Chairs may be among the most useful inventions known to humanity, but that doesn’t mean that a clever engineer or two can’t improve on the idea. As proof, we offer you this list of robotic chairs that do much more than provide a place to put your rear in.
robot1024 Articles
RoboGames 2008 Photos And Videos

Laughing Squid’s [Scott Beale] is attending RoboGames 2008. Check out the great pictures and videos he took on Flickr.
Water Runner Robot

Researchers at Carnegie Mellon University’s NanoRobotics Lab have developed a robot that is capable of running on the surface of a pool of water. Like their wall climbing Waalbot, the Water Runner was inspired by the abilities of a lizard, in this case, the basilisk. The team studied the motions of the basilisk and found morphological features and aspects of the lizard’s stride that make running on water possible. Both the lizard and the robot run on water by slapping the surface to create an air cavity like the one above, then push against the water for the necessary lift and thrust. Several prototypes have been built, and there are variants with 2 or 4 legs and with on and off-board power sources. You can see a slow motion video of the robot’s movement below.
The purpose of their research is to create robots that can traverse any surface on earth and waste less energy to viscous drag than a swimming robot would. Though another of the team’s goals is to further legged robot research, the Water Runner is not without potential practical applications. It could be used to collect water samples, monitor waterways with a camera, or even deliver small packages. Download the full abstract in PDF format for more information.
Magnetically Actuated Microbots
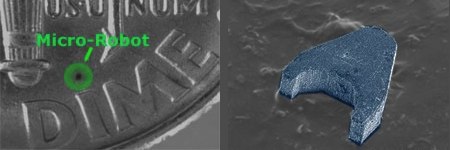
The Carnegie Mellon NanoRobotics Lab uses external magnetic fields to precisely control their nanosoccer players. The micro robots are just 300×300 micron specs of neodymium-iron-boron permanent magnets that have been laser machined. The working volume is surrounded by five electromagnetic coils. Four coils are used for position while the fifth provides clamping force to the work surface. The bot can be operated almost anywhere as long as the surface isn’t magnetically active. Machine vision is used to watch the bot and provide feedback control. Embedded below is the robot moving across a glass slide next to a dime. It can travel at speeds up to 60 body lengths per second.
RoboGames 2008 This Weekend
The fifth annual RoboGames is happening this weekend in San Francisco. RoboGames is a broad reaching competition designed to bring together specialists in all areas of robotics. Last year’s event had 800 entries in 62 different events. The biggest audience draw is definitely the combat robots shown in the video above, but there are other skill and task based competitions. If you’re in the area, this is definitely worth your time. Check out ROBOT magazine’s coverage from last year to get an idea of what you’ll see (or in our case miss).
[thanks io9]
Portrait Robot
[bre] passed along this portrait drawing robot from the same people that brought you the chief cook robot. Like the previous project, the portrait drawing bot emphasizes man machine interaction. The subject sits down and is asked for the quill. The robot captures the subject’s image and runs it through several processing steps. One set is to determine the contours and another is to determine the fill. The robot then draws the the contours and fills returning to the ink pot each time it reaches a trajectory threshold. Quill drawing can be quite hard for novice illustrators, but the robot’s smooth trajectory calculations prevent drips and stains.
Robofish > Real Fish
This is the kind of engineering that gets us excited, and not just because we like machines modeled on living things. Science Daily reports that Associate professor [Kristi Morgansen] from The University of Washington has developed these robofish for underwater data collection. Her technology is notable for two major reasons: the small robots use fins for locomotion instead of propellers, which reduces drag and creates greater maneuverability. The second and more important reason is that the robofish can communicate with each other via sonar, largely obviating the need for the robofish to surface for more instructions. Both design concepts were inspired by the shape and behavior of real fish. Currently the robots are only programmed to swim with or away from each other, but these are still prototypes and the technology looks promising. For more tech specs on these “Fin Actuated Autonomous Underwater Vehicles” (see why Robofish is better?), you can have a look at Morgansen’s notes.








