Too busy playing video games to have a social life? No worries. In 1985, Nintendo introduced R.O.B. — otherwise known as the Robotic Operating Buddy. It was made to play Nintendo with you. In Japan, apparently, it was the Family Computer Robot. We suppose ROB isn’t a very Japanese name. The robot was in response to the video game market crash of 1983 and was meant to keep the new Nintendo Entertainment System (NES) from being classified as a video game, which would have been a death sentence at the time of its release.
Since you might not have heard of R.O.B., you can probably guess it didn’t work out very well. In fact, the whole thing tanked in two years and resulted in only two games.
ChatGPT has been put to all manner of silly uses since it first became available online. [Engineering After Hours] decided to see if its coding skills were any chop, and put it to work programming a circular saw. Pun intended.
The aim was to build a line following robot armed with a circular saw to handle lawn edging tasks. The circular saw itself consists of a motor with a blade on it, and precisely no safety features. It’s mounted on the front of a small RC car with a rack and pinion to control its position. [Engineering After Hours] has some sage advice in this area: don’t try this at home.
ChatGPT was not only able to give advice on what parts to use, it was able to tell [Engineering After Hours] on how to hook everything up to an Arduino and even write the code. The AI language model even recommended a PID loop to control the position of the circular saw. Initial tests were messy, but some refinement got things impressively functional.
As a line following robot, the performance is pretty crummy. However, as a robot programmed by an AI, it does pretty okay. Obviously, it’s hard to say how much help the AI had, and how many corrections [Engineering After Hours] had to make to the code to get everything working. But the fact that this kind of project is even possible shows us just how far AI has really come.
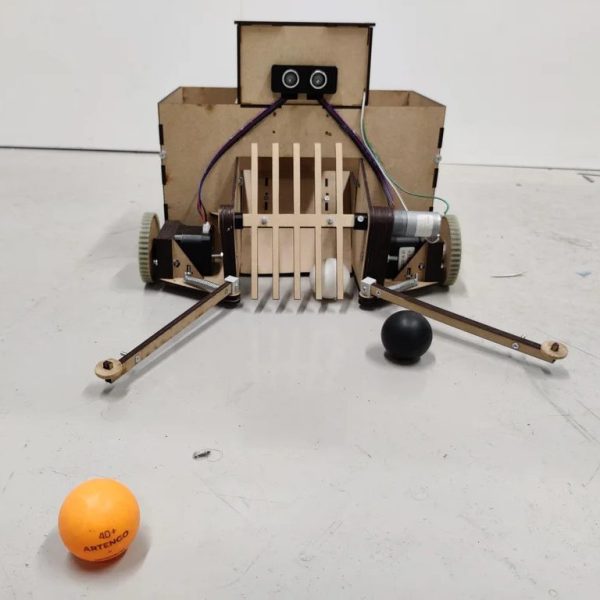
The robot is specifically designed to pick up ultra-light ping pong balls. To that end, it has a large spinning paddle that simply wafts the balls into its collector basket at the rear. The robot gets around with a simple two-motor drive system, relying on skid-steering with a castor wheel at the rear. An Arduino Uno runs the show, and navigates the robot around with the aid of ultrasonic sensors to avoid crashing into walls.
Overall, the robot shows the benefits of designing for a specific purpose. Such a design would likely be far less successful with other types of heavier balls, but for ping pong balls, the spinning paddle collector works great. We can imagine the robot being put to good use between sets to pick up all the lost balls around a table tennis court.
Some projects start with a relatively simple idea that quickly turns into a bit of a nightmare when you get to the actual implementation. [Hacksmith Industries] found this to be the case when they decided to build a giant rideable hexapod, Megahex. [YouTube]
After seeing a video of a small excavator that could move itself small distances with its bucket, the team thought they could simply weld six of them together and hook them to a controller. What started as a three month project quickly spiraled into a year and a half of incremental improvements that gave them just enough hope to keep going forward. Given how many parts had to be swapped out before they got the mech walking, one might be tempted to call this Theseus’ Hexapod.
Despite all the issues getting to the final product, the Megahex is an impressive build. Forward motion and rotation on something with legs this massive is a truly impressive feat. Does the machine last long in this workable, epic state? Spoilers: no. But, the crew learned a lot and sometimes that’s still a good outcome from a project.
If you’re looking for more hexapod fun, checkout Stompy, another rideable hexapod, or Megapod, a significantly smaller 3D-printed machine.
Robot delivery has long been touted as a game-changing technology of the future. However, it still hasn’t cracked the big time. Drones still aren’t airdropping packages into our gutters by accident, nor are our pizzas brought to us via self-driving cars.
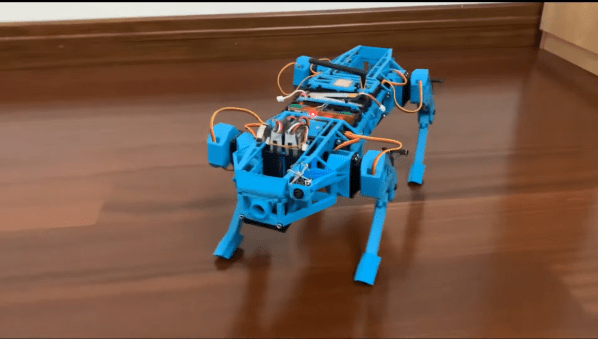
The robot dog itself goes by the name of LOTP, for unspecified reasons, and was designed from the ground up in Fusion 360. A Teensy 3.5 is charged with running the show, managing control inputs and outputting the requisite instructions to the motor controllers to manage the walk cycle. Movement are issued via a custom RC controller. Thanks to an onboard IMU, the robotic platform is able to walk effectively and maintain its balance even on a sloping or moving platform.
[Limenitis] has built the robot with a modular platform to support different duties. Equitable modules include a sensor for detecting dangerous gases, a drone launching platform, and a lidar module. There’s also a provision for a camera which sends live video to the remote controller. [Limenitis] has that implemented with what appears to be a regular drone FPV camera, a straightforward way to get the job done.
It’s a fun build that looks ready to scamper around on adventures outside. Doing so with an FPV camera certainly looks fun, and we’ve seen similar gear equipped on other robot dogs, too.
The original Roomba robotic vacuum cleaner led to loads of clones and lookalikes over the years, and one of them is the ALEE mopping “robot”. [Raymond] tears it down and reveals what’s inside. Turns out it contains mostly regret! Although it does host some design cleverness in its own way.
Technically the ALEE, which cost [Raymond] a cool $85 USD, is not a robot since it has no sensors. And unless a dragging a wet cloth pad kept moist by a crude drip reservoir counts as “mopping”, it’s not much of a mop, either.
This one-motor unit (and tiny battery) is responsible for both motion and direction control. There are no sensors.
There is one interesting aspect to this thing, and it’s to do with the drive system and direction control. The whole thing is driven by a single motor, and not a very powerful one. The center of the robot has a pair of wheels that are both driven at the same rate and speed, and the wheel assembly can pivot around its axis. That’s about it. There are not even any bump sensors of any kind.
So how does this thing move, let alone change direction to (poorly) emulate an original Roomba-like crisscross pattern? The control board appears to have one job: if the motor stalls, reverse direction. That, combined with the fact that the drive unit can pivot and the enclosure is dragging a wet rag, appears to be all the chaos that’s needed to turn bonking into a wall into an undefined direction change.
It’s not great performance, but it sure is some impressive cost-cutting. You can see it bonk around unimpressively in a short video, embedded below the page break.
Just to be clear, [Raymond] knows perfectly well what he’s in for when he obtains cheap tech items from overseas retailers for teardowns. The ALEE does have some mildly interesting secrets to share, but overall, it really wasn’t worth it. Sometimes cheap tech has hacker potential, but there’s no such potential here. Seriously, don’t buy this thing.