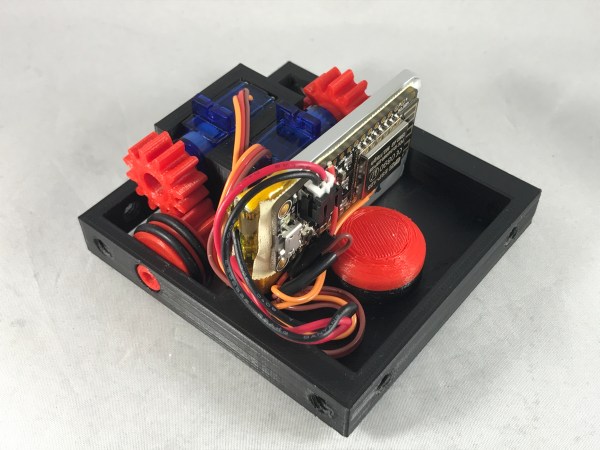
This unusual 3D printed Rolling Robot by [ebaera] uses two tiny hobby servos for locomotion in an unexpected way. The motors drive the front wheel only indirectly, by moving two articulated arms in a reach-and-retract motion similar to a breaststroke. The arms are joined together at the front, where a ratcheting wheel rests underneath. When the arms extend, the wheel rolls forward freely. When the arms retract, the wheel’s ratchet locks and the rest of the body is pulled forward. It looks as though extending one arm more than the other provides for rudimentary steering.
The parts are all 3D printed but some of them look as though they might be a challenge to print well due to the number of small pieces and overhangs. A short video (embedded below) demonstrates how it all works together; the action starts about 25 seconds in.
Continue reading “Rolling Robot With Two Motors, But None Are On The Wheels”