After talking with a few of the judges for The Hackaday Prize, documentation will be a large factor in determining who wins and takes a trip to space, and who is left with their feet safely planted on the ground. Stubby the Hexapod is one of the most well documented projects in the running. There are already two hardware revisions for the walking mechanism, several board layouts for the controller, and more project log entries than you can shake a stick at.
Stubby is the brainchild of [The Big One] (a.k.a. [Wyatt] with [Warren], [Princess Sparkle], and [exot] filling out the rest of the team). The project originally began as an educational robotics project meant for teaching [Wyatt]’s kids the ins and outs of robotics and electronics. He’s doing this by developing an open source hexapod robot platform, complete with a frame, electronics board, and a lot of interesting code driving 18 hobby servos.
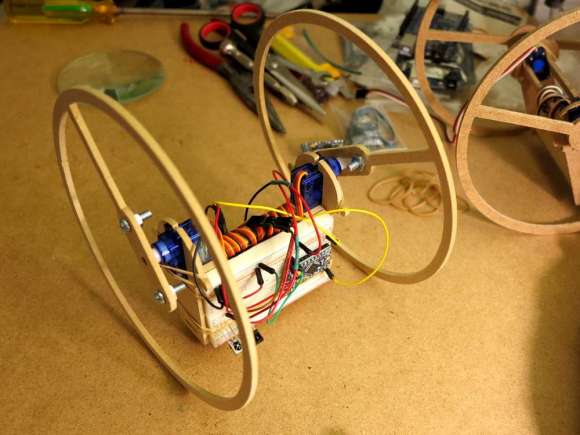
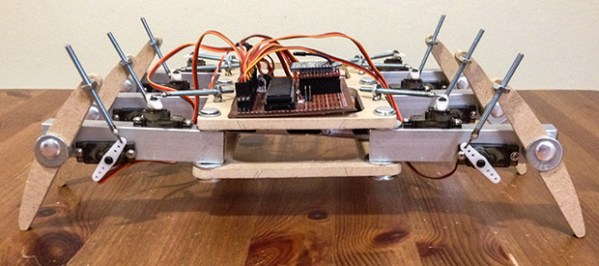
The frame for Stubby’s first hardware revision is rather interesting; it’s able to be reproduced with nothing more than a scroll saw. The latest revision is a complete rethinking of hexapod locomotion using 2DOF legs and a more mechanical gait.
Being completely open source and very well documented, you can already make your own Stubby hexapod with a scroll saw and the files on [Wyatt]’s site. If 3D printing is more your thing, there’s also a few files to help you with that.
You can check out a few videos of the different Stubby revisions below:
 The project featured in this post is a semifinalist in The Hackaday Prize.
The project featured in this post is a semifinalist in The Hackaday Prize.
Continue reading “THP Semifinalist: Stubby, The Adorable Hexapod”
 During our trip out to Vegas for Defcon, we were lucky enough to catch up with a few of the companies that should be of interest to Hackaday readers. One of the companies based out of the area is
During our trip out to Vegas for Defcon, we were lucky enough to catch up with a few of the companies that should be of interest to Hackaday readers. One of the companies based out of the area is