When all else fails, there’s amateur radio — and handwritten notes. Both ham radio and clear thinking helped rescue a mother and her son from a recent California camping trip gone wrong. While driving to the campsite in the Stanislaus National forest, the 49-year-old mother had the not-uncommon experience of GPS leading her and her 9-year-old son on a merry chase, sending her down a series of forest roads. Eventually the foliage got too dense for the GPS signals to penetrate, leaving the pair stranded in the forest with no guidance on how to get out.
When a new technology first arrives in people’s hands, it often takes a bit of time before the full capabilities of that technology are realized. In much the same way that many early Internet users simply used it to replace snail mail, or early smartphones were used as more convenient methods for messaging and calling than their flip-phone cousins, autonomous drones also took a little bit of time before their capabilities became fully realized. While some initially used them as a drop-in replacement for things like aerial photography, a group of mountain rescue volunteers in the United Kingdom realized that they could be put to work in more efficient ways suited to their unique abilities and have been behind a bit of a revolution in the search-and-rescue community.
The first search-and-rescue groups using drones to help in their efforts generally used them to search in the same way a helicopter would have been used in the past, only with less expense. But the effort involved is still the same; a human still needed to do the searching themselves. The group in the UK devised an improved system to take the human effort out of the equation by sending a drone to fly autonomously over piece of mountainous terrain and take images of the ground in such a way that any one thing would be present in many individual images. From there, the drone would fly back to its base station where an operator could download the images and run them through a computer program which would analyse the images and look for outliers in the colors of the individual pixels. Generally, humans tend to stand out against their backgrounds in ways that computers are good at spotting while humans themselves might not notice at all, and in the group’s first efforts to locate a missing person they were able to locate them almost immediately using this technology.
Although the system is built on a mapping system somewhat unique to the UK, the group has not attempted to commercialize the system. MR Maps, the software underpinning this new feature, has been free to use for anyone who wants to use it. And for those just starting out in this field, it’s also worth pointing out that location services offered by modern technologies in rugged terrain like this can often be misleading, and won’t be as straightforward of a solution to the problem as one might think.
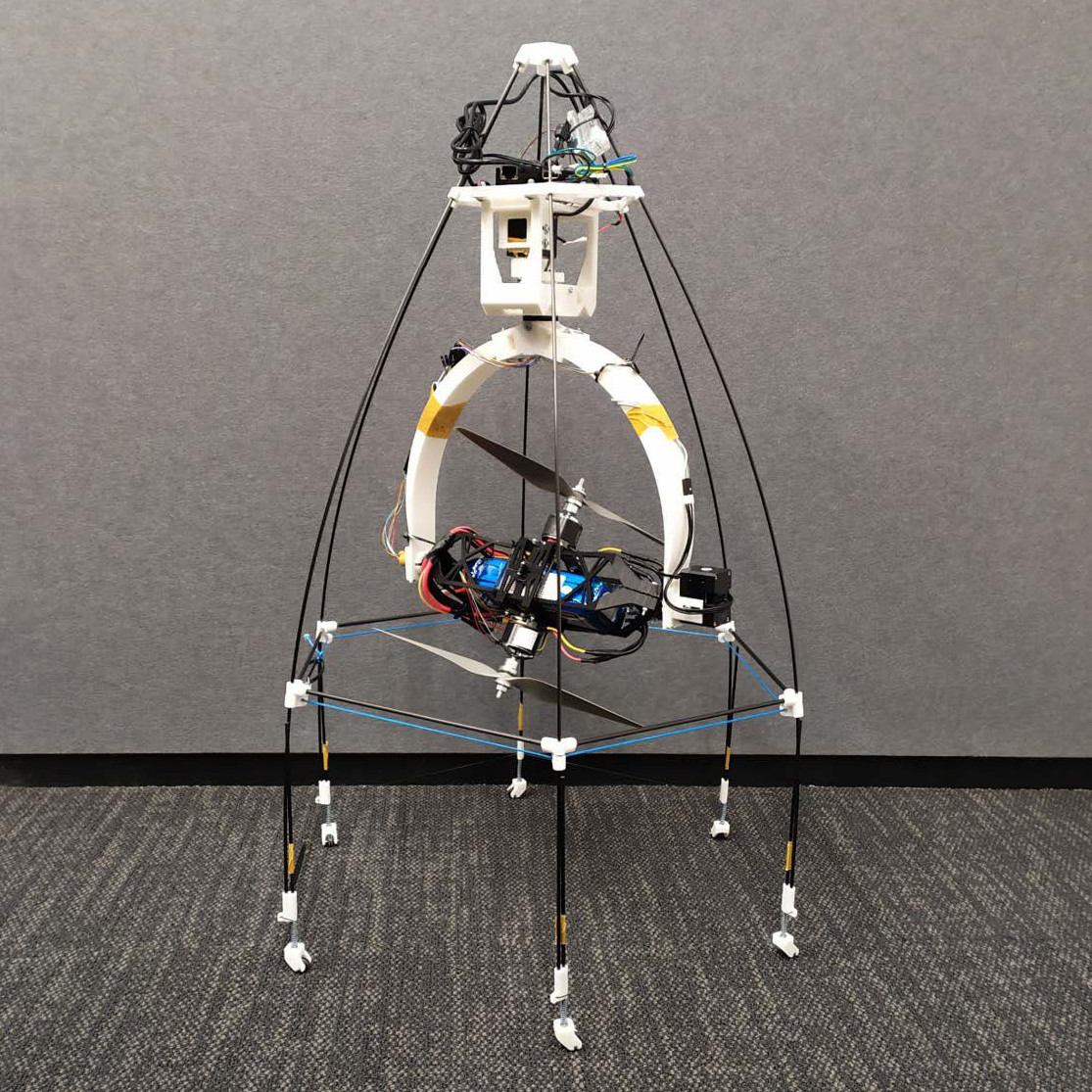
What can drive on the ground, hop in the air, and continuously move its coaxial rotor assembly without ever having to reset its position? The answer is [New Dexterity]’s Omnirotor All-Terrain Platform.
Although still very much a prototype, the video below the break shows that the dexterity claimed by Omnirotor isn’t just a lot of hype. Weaving through, around, and over obstacles is accomplished with relative ease by way of a coaxial rotor configuration that’s sure to turn some heads.
Omnirotor’s unique design lends to its agility
While not novel in every aspect, the Omnirotor’s strength comes from a combination of features that are fairly unique. The coaxial rotors are fully gimballed, and as such can be moved to and from any direction from any other direction. In other words, it can rotate in any axis infinitely without needing to return to a home position. Part of this magic comes from a very clever use of resources: The battery, speed controllers, and motors are all gimballed as one. This clever hack avoids the need for large, heavy slip rings that would otherwise be needed to transmit power.
Adding to the Omnirotor’s agility is a set of wheels that allow the craft to push itself along a surface, presumably to decrease power consumption. What if an obstacle is too difficult to drive around or past? The Omnirotor takes to the air and flies over it. The coaxial rotors are caged, protecting them from the typical rotor-snagging dangers you’d expect in close quarters.
[New Dexterity] has Open Sourced the entire project, with the Omirotor design, Firmware, and even the benchmarking platform available on Github so that others can share in the fun and iterate the design forward even further.
When lost hiking out in the back country, a cell phone might not seem like the most useful tool. Absent a signal from the cellular network, it’s not possible to make outgoing calls for help. However, carrying your phone may just make it a lot easier for rescuers to find you, and [Eric] is making a tool to do the job.
The handheld version of ResQ features a directional Yagi antenna to help pinpoint the location of the signal.
[Eric]’s project is named ResQ, and aims to find lost hikers by detecting the beacon packets from a cellphone’s WiFi adapter. The project comes in two forms; a handheld unit with a directional Yagi antenna, and a drone-mounted unit that can overfly terrain to scan for signals.
ResQ is built around the ESP8266, which is a cheap and accessible way to build a custom WiFI scanner. Currently, the system is able to detect WiFi devices and log MAC addresses along with timestamps and GPS location data to an SD card to help rescuers locate lost individuals. Future plans involve adding a live downlink to the drone such that any pings can be reported live for rescuers to investigate.
Similar systems exist commercially, primarily working with cell signals rather than WiFi. Costs are prohibitively high for many organisations though, so we can see ResQ filling in gaps as a useful tool to have. We’ve featured other radio gear for search and rescue before, too. Video after the break.
The wheel is a revolutionary invention — as they say — but going back to basics sometimes opens new pathways. Robots that traverse terrain on legs are on the rise, most notably the Boston Dynamics Big Dog series of robots — and [Ghost Robotics]’ Minitaur quadruped aims to keep pace.
One of [Ghost Robotics] founders, [Gavin Knneally] states that co-ordination is one of the main problems to overcome when developing quadruped robots; being designed to clamber across especially harsh terrain, Minitaur’s staccato steps carry it up steep hills, stairs, across ice, and more. Its legs also allow it to adjust its height — the video shows it trot up to a car, hunker down, then begin to waddle underneath with ease.