With cheap RC hardware, powerful motors, and high-capacity battery packs, getting something to fly has never been easier. It also helps that, whether you’re into fixed-wing craft or multirotors, there’s plenty of information and prior art floating around online that you can use to jumpstart your own build. But when it comes to homebrew vertical take-off and landing (VTOL) planes, things are a bit trickier.
Luckily for us, [Nicholas Rehm] has made all the plans and information necessary to duplicate his incredible RC F-35 available for anyone who wants to experiment with these relatively niche fliers. Even if it was a standard park flier, the build would be worth a close look thanks to the vectored thrust motors that give it phenomenal maneuverability and a top speed in the neighboorhood of 120 KPH (80 MPH). But with the flick of a switch, the plane transitions into a tricopter-like flight mode that allows it to land and takeoff vertically.
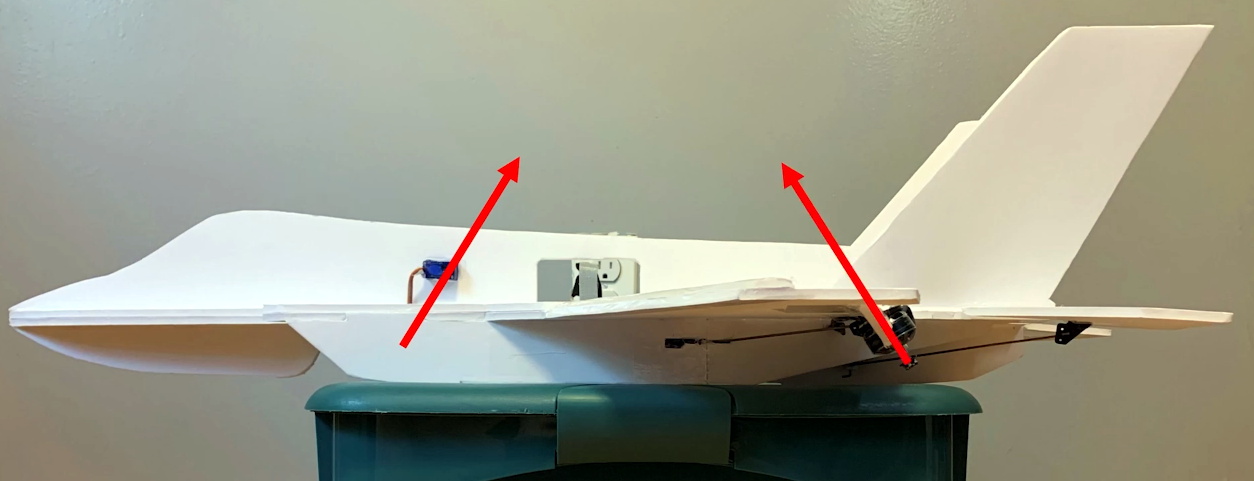 How does it work? The downward facing motor just behind the “cockpit” lifts up the front of the foam flier and tilts left and right to provide yaw control, while the two motors on the back tilt down to lift up the rear of the aircraft. Aviation buffs in the audience may recognize this as being fairly close to how the actual F-35B hovers, although on the real jet fighter, downward thrust under the wings is generated by redirected turbine exhaust rather than dedicated motors, and yaw control is provided by swiveling the engine’s nozzle rather than the front lift fan.
How does it work? The downward facing motor just behind the “cockpit” lifts up the front of the foam flier and tilts left and right to provide yaw control, while the two motors on the back tilt down to lift up the rear of the aircraft. Aviation buffs in the audience may recognize this as being fairly close to how the actual F-35B hovers, although on the real jet fighter, downward thrust under the wings is generated by redirected turbine exhaust rather than dedicated motors, and yaw control is provided by swiveling the engine’s nozzle rather than the front lift fan.
Getting the plane to takeoff vertically was one thing, but being able to transition from a hover into forward flight was quite another. To make this aerial transformation possible [Nicholas] actually had to write his own flight controller software, which he calls dRehmFlight. The GPLv3 code runs on the Teensy 4.0 and uses the common GY-521 MPU6050 gyroscope/accelerometer, so you don’t need to get any custom boards spun up just to give it a test drive flight. In the video below he walks through configuring the software for VTOL operation by defining how each control surface and motor is to respond to control input given the currently selected flight mode.
It probably won’t surprise you to hear that this isn’t the first time [Nicholas] has experimented with unusual flying machines. Last year we covered his RC Starship, which managed to stick the “belly flop” landing even before SpaceX managed to get the real life version down in one piece.



 [Joel] wants his model to be as close as possible to the real thing, and has integrated all these features into his build. Thrust is provided by two EDF motors, the pivoting nozzle is 3D printed and actuated by three set of small DC motors, and all 5 doors for VTOL are actuated by a single servo in the nose via a series of linkages. For tilt control, air from the main fan is channeled to the wing-tips and controlled by servo-actuated valves. A flight controller intended for use on a multi-rotor is used to help keep the plane stable while hovering. One iteration of this plane bit the dust during development, but [Joel] has done successful test flights for both hover and conventional horizontal flight. The really tricky part will be transitioning between flight modes, and [Joel] hopes to achieve that in the near future.
[Joel] wants his model to be as close as possible to the real thing, and has integrated all these features into his build. Thrust is provided by two EDF motors, the pivoting nozzle is 3D printed and actuated by three set of small DC motors, and all 5 doors for VTOL are actuated by a single servo in the nose via a series of linkages. For tilt control, air from the main fan is channeled to the wing-tips and controlled by servo-actuated valves. A flight controller intended for use on a multi-rotor is used to help keep the plane stable while hovering. One iteration of this plane bit the dust during development, but [Joel] has done successful test flights for both hover and conventional horizontal flight. The really tricky part will be transitioning between flight modes, and [Joel] hopes to achieve that in the near future.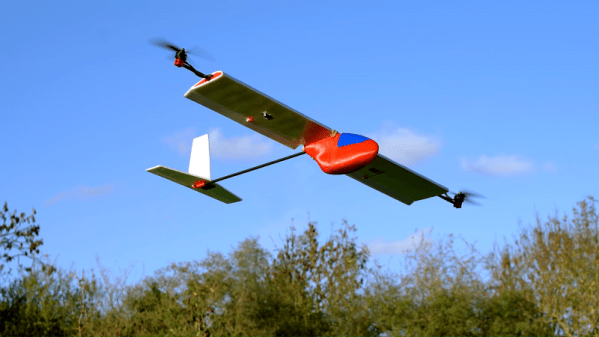


 The Delta Clipper was an unmanned demonstrator launch vehicle flown from 1993 to 1996 for testing vertical takeoff and landing (VTOL) single-stage to orbit (SSTO) technology. For anyone who watched SpaceX testing VTOL with its
The Delta Clipper was an unmanned demonstrator launch vehicle flown from 1993 to 1996 for testing vertical takeoff and landing (VTOL) single-stage to orbit (SSTO) technology. For anyone who watched SpaceX testing VTOL with its