It was bound to happen sooner or later, but that doesn’t diminish the awesomeness of [Matthew]’s Raspberry Pi-powered quadcopter.
[Matthew]’s quadcopter is similar to all the other flying drones we’ve seen before with one important difference – all the processing, from reading the gyroscopes to computing exactly how much power to give each motor – is handled by a Raspberry Pi. This task is usually the domain of a microcontroller, as these calculations need to happen in real-time. The Linux distro [Matt] is running on his Pi has a lot more overhead than a simple AVR or ARM microcontroller, so doing everything that needs to be done in real-time isn’t guaranteed. With a bit of clever programming, [Matthew] managed to make sure all the necessary tasks were taken care of in time. It’s still not a real-time operating system, but for this project at least, it’s good enough.
Since the Raspberry Pi in [Matthew]’s quadcopter is much more powerful than a microcontroller, there’s plenty of head room to SSH into the ‘copter while it’s flying. There may even be enough processing power to stream video to a web server; we honestly can’t wait to see what [Matthew] does with his flying Linux computer in the future.
Given how many incredible builds we’ve covered over the last couple of years, we knew that an official Cyberdeck Contest would certainly receive some impressive entries. But never in our wildest dreams could we have predicted that more than 100 decks would end up crossing the finish line, or that of them, the vast majority would be never-before-seen designs. In fact, the response to this contest was so overwhelming that the judging process took far longer than we originally anticipated.
Ultimately, we decided that there were simply too many phenomenal builds entered into the contest to award $150 Digikey spending sprees to just three of them. So as an added bonus, we’ve rustled up some $50 Tindie gift certificates that will go to the four special category honorable mentions.
With that, let’s take a look at the cyberdecks that took top honors as decided by our panel of judges.
If you want to build your own rover, there’s plenty of cheap RC trucks out there that will provide a serviceable chassis to work with. Looking to go airborne with a custom drone? Thanks to the immense popularity of first-person view (FPV) flying, you’ll find a nearly infinite variety of affordable fixed wing and quadcopter platforms out there to chose from. But when it comes to robotic watercraft, the turn-key options aren’t nearly as plentiful; the toys are all too small, and the commercial options are priced for entities that have an R&D budget to burn. For amateur aquatic explorers, creativity is the name of the game.
Take for example this impressive vessel built by [wesgood]. With a 3D printed electronics enclosure mounted to a pair of pontoons made of cheap 4-inch PVC pipe available from the hardware store, it provides a stable platform without breaking the bank. Commercial jet drive units built into the printed tail caps for the pipes provide propulsion, and allow the craft to be steered through differential thrust. Without rudders or exposed propellers, this design is particularly well-suited for operating in shallow waters.
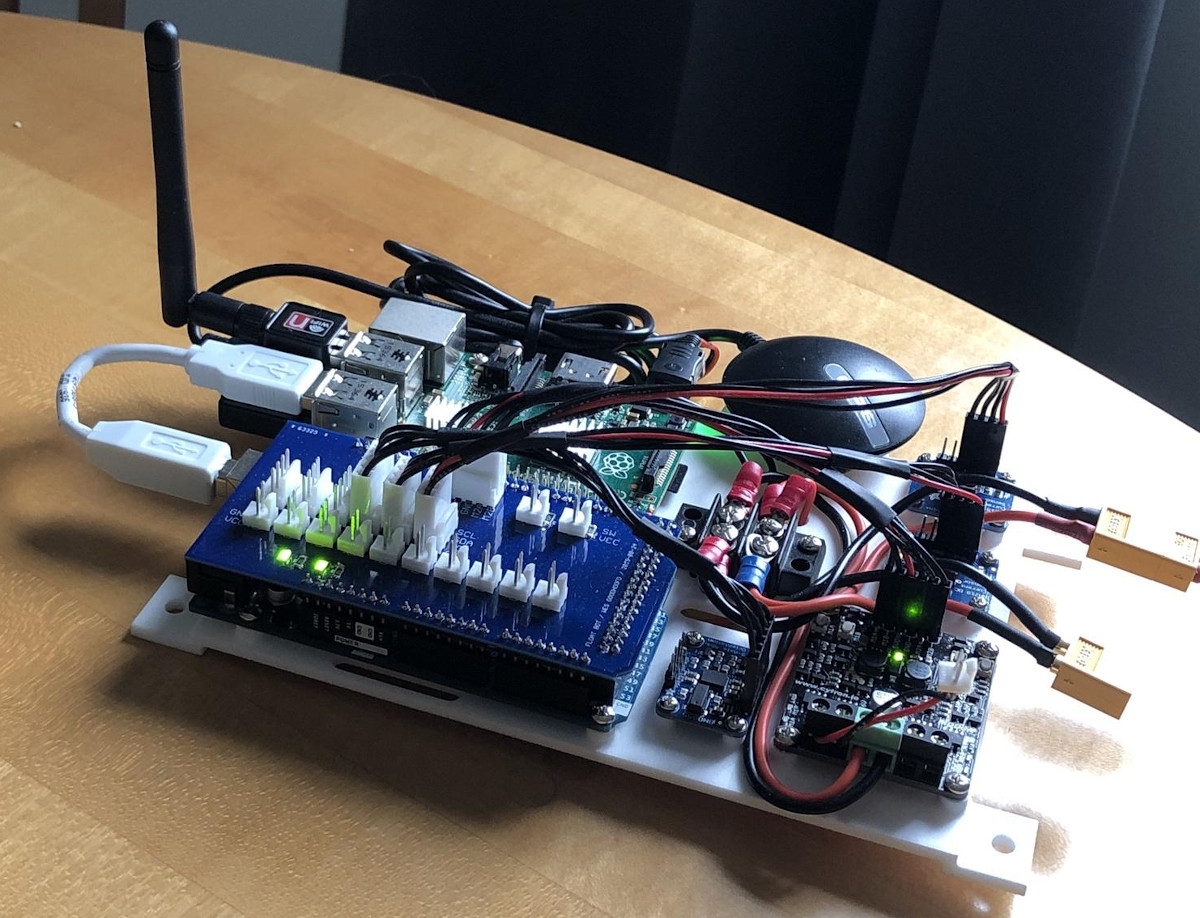
A removable electronics tray allows for easy access.
Perched high above the water, the electronics box contains a Raspberry Pi 2, BU353 USB GPS receiver, and a Arduino Mega 2560 paired with a custom PCB that offers up convenient ports to connect a dual-channel Cytron 3 amp motor driver and Adafruit BNO055 9-DOF IMU. Power is provided by two 6,000 mAh LiPo batteries mounted low in the pontoons, and a matching pair of Adafruit current/voltage sensors are used to keep track of the energy budget. A small USB WiFi dongle with an external antenna plugged into the Pi offers up a WiFi network that [wesgood] can connect to with an iPad for control.
If the control software for the craft looks particularly well-polished, it’s probably because [wesgood] just so happens to be a professional developer with a focus on mobile applications. While we’re a bit skeptical of using WiFi for a critical long-distance link, we can’t deny that the iPad allows for a very slick interface. In addition to showing the status of the craft’s various systems, it lets the user either take manual control or place waypoints for autonomous navigation — although it sounds like that last feature is only partially implemented right now.
Hackaday editors Elliot Williams and Mike Szczys get charged up on the best hacks the week had to offer. The 3D printer design gods were good to us, delivering an upside-down FDM printer and a hack that can automatically swap out heated beds for continuous printing. We look at a drone design that builds vertical wings into the frame of a quadcopter — now when it tips on its side it’s a fixed-wing aircraft! We chew the artificially-intelligent fat about GitHub CoPilot’s ability (or inability?) to generate working code, and talk about the firm future awaiting solid state batteries.
Take a look at the links below if you want to follow along, and as always, tell us what you think about this episode in the comments!
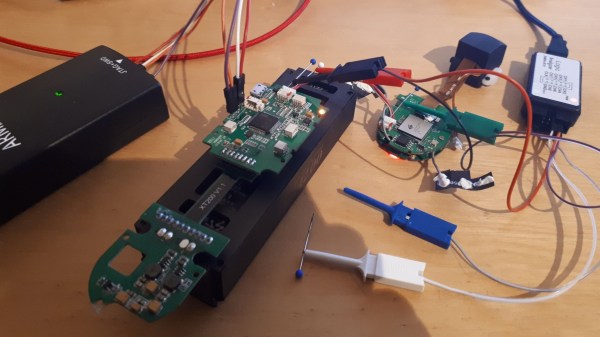
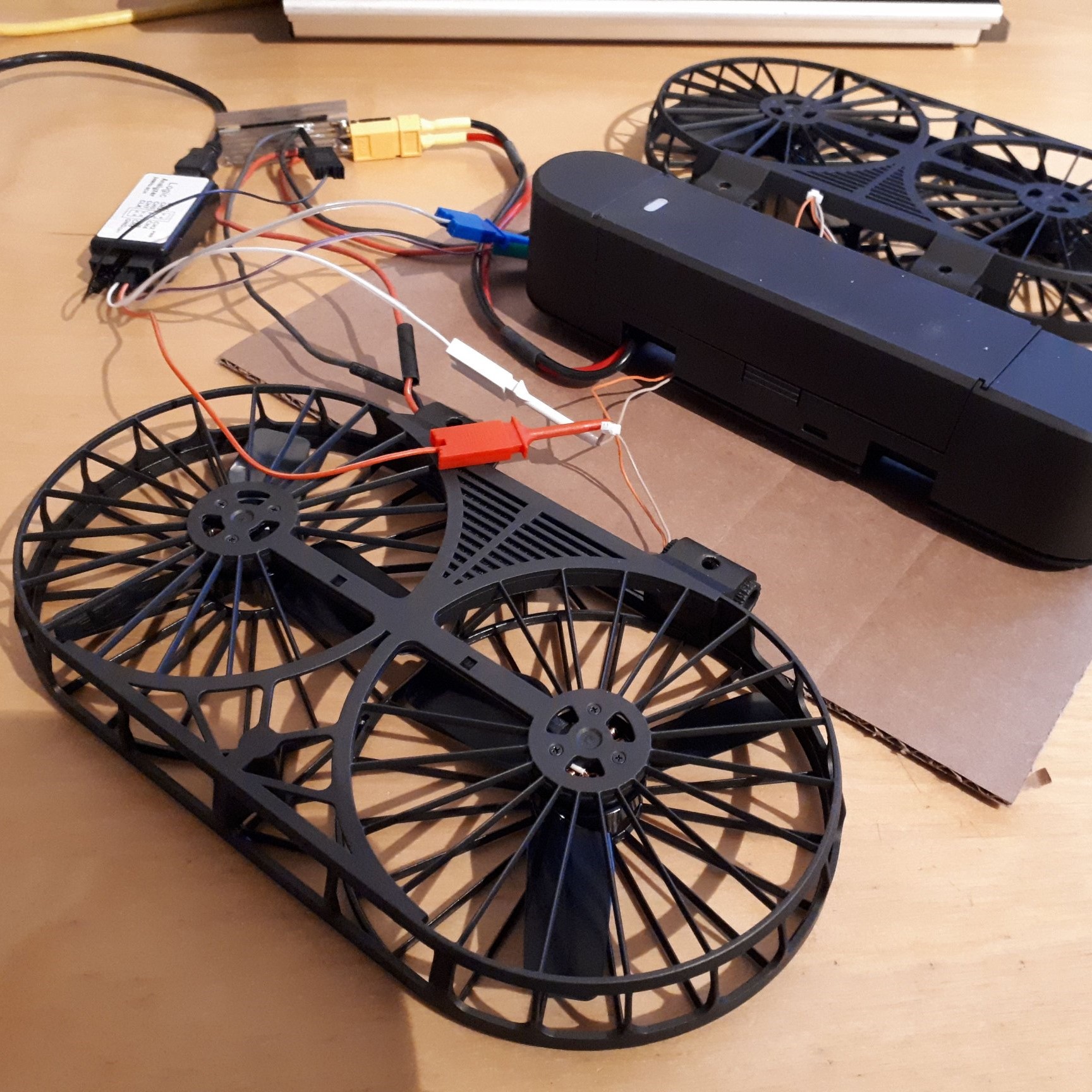
Sometimes bad software is all that is holding good hardware back. [Michael Melchior] wanted to scavenge some motors and propellers for another project, so he bought an inexpensive quadcopter intending to use it for parts. [Michael] was so surprised at the quality of the hardware contained in his $100 drone that he decided to reverse engineer his quadcopter and give the autopilot firmware a serious upgrade.
Upon stripping the drone down, [Michael] found that it came with a flight management unit based on the STM32F405RG, an Inertial Measurement Unit, magnetic compass, barometric pressure sensor, GPS, WiFi radio, camera with tilt, optical flow sensor, and ultrasonic distance sensor, plus batteries and charger! The flight management unit also had unpopulated headers for SWD, and—although the manufacturer’s firmware was protected from reading—write protection hadn’t been enabled, so [Michael] was free to flash his own firmware.
We highly recommend you take a look at [Michael]’s 10 part tour de force of reverse engineering which includes a man-in-the-middle attack with a Raspberry Pi to work out its WiFi communication, porting the open-source autopilot PX4 to the new airframe, and deciphering unknown serial protocols. There are even amusing shenanigans like putting batteries in the oven and freezer to help figure out which registers are used as temperature sensors. He achieves liftoff at the end, and we can’t wait to see what else he’s able to make it do in the future.
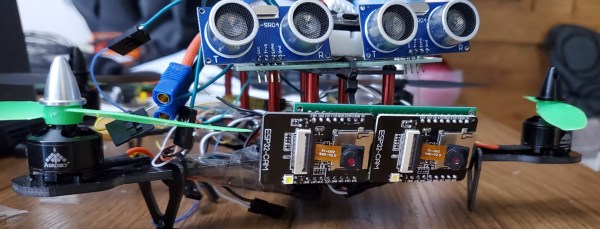
Flying a quadcopter or other drone can be pretty exciting, especially when using the video signal to do the flying. It’s almost like a real-life video game or flight simulator in a way, except the aircraft is physically real. To bring this experience even closer to the reality of flying, [Kevin] implemented stereo vision on his quadcopter which also adds an impressive amount of functionality to his drone.
While he doesn’t use this particular setup for drone racing or virtual reality, there are some other interesting things that [Kevin] is able to do with it. The cameras, both ESP32 camera modules, can make use of their combined stereo vision capability to determine distances to objects. By leveraging cloud computing services from Amazon to offload some of the processing demands, the quadcopter is able to recognize faces and keep the drone flying at a fixed distance from that face without needing power-hungry computing onboard.
There are a lot of other abilities that this drone unlocks by offloading its resource-hungry tasks to the cloud. It can be flown by using a smartphone or tablet, and has its own web client where its user can observe the facial recognition being performed. Presumably it wouldn’t be too difficult to use this drone for other tasks where having stereoscopic vision is a requirement.
Thanks to [Ilya Mikhelson], a professor at Northwestern University, for this tip about a student’s project.
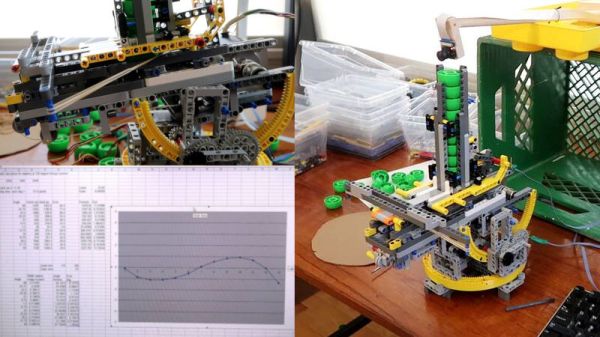
Before 3D printers, there was LEGO. And the little bricks are still useful for putting something together on the quick. Proof is YouTuber [Matthias Wandel]’s awesome bottle cap shooter build that uses rudimentary DIY computer vision to track you and then launch a barrage of plastic pieces at you.
This is an amazing project that has a bit of something for everyone. Lets start with the LEGO. [Matthias Wandel] starts with making a crossbow designed launcher and does an awesome job with showing us how it works in a video. The mechanism is an auto reloading and firing system that can be connected to a stepper motor. Next comes the pan and tilt mechanism which allows the turret to take better aim at moving targets: more LEGO and stepper motors.
The target tracker uses color matching in a program that curiously uses no OpenCV. It compares consecutive frame and then filters out red objects – the largest red dot is it. Since using a fisheye lens on the Raspbery Pi camera adds distortion, [Matthias Wandel] uses a jig made with more Legos to calibrate the image.
The final testing involved having his own child walk around the room being hunted but the autonomous machine. Kids do love toys even if they are trying to shoot bottle caps at them.