Amateur rocketry has been popular for ages, with designs ranging from small toy-scale model rockets to large-scale liquid fuel designs with steerable fins. A team out of Portland State works on some large-scale amateur rockets that can fly to very high altitudes. Since the atmosphere is thin the further the rocket flies, steering fins aren’t incredibly effective once the rockets reach high altitude. A team of students tackled this problem by designing a cold-gas reaction module to steer high-altitude rockets.
The team chose nitrogen as their cold-gas propellant, which is stored in a carbon fiber tank. After passing through a regulator, the gas is routed to several gas solenoids and then to a custom 3d-printed de Laval nozzle. An Intel Edison is used to drive the system, which calculates the rocket’s orientation with a MPU-6050. Control loops use the orientation information and fire gas through any of several nozzle ports to steer the rocket.
The system does have some limits: the solenoids are either on or off, not variable, and they aren’t incredibly fast. Even with these limitations, the team is confident that their module will work great when it embarks on its maiden flight in a brand-new custom rocket next year. The team was also awesome enough to make all of their design files open-source so you can build your own (although they warn that it’s a bit complicated and dangerous). Check out the video after the break to see a test-run of the cold-gas reaction system.
Thanks for the tip, [Nathan]!
Continue reading “Steering High Altitude Rockets With Cold Gas” →



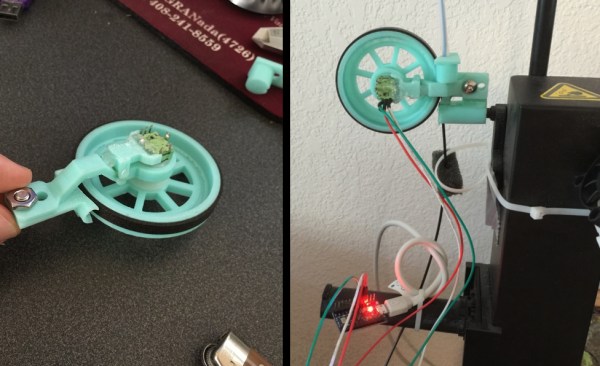
 [Florian] designed a small assembly with a wheel and encoder that measures filament movement. The filament passes under the encoder wheel before it’s fed into the 3D printer. The encoder is hooked up to an Arduino which measures the Gray code pulses as the encoder rotates, and the encoder count is streamed over the serial port to a computer.
[Florian] designed a small assembly with a wheel and encoder that measures filament movement. The filament passes under the encoder wheel before it’s fed into the 3D printer. The encoder is hooked up to an Arduino which measures the Gray code pulses as the encoder rotates, and the encoder count is streamed over the serial port to a computer.
 Next [Vlad] took to the water. His first attempt was a home-built airboat, which looked awesome but unfortunately didn’t work very well. Finally he ended up buying a $20 boat off of eBay and made a MOSFET-based motor controller to drive its dual thrusters. This design worked much better and after a bit of PID tuning, the boat was autonomously navigating between waypoints in the water. In the future [Vlad] plans to use the skills he learned on this project to make an autopilot for the
Next [Vlad] took to the water. His first attempt was a home-built airboat, which looked awesome but unfortunately didn’t work very well. Finally he ended up buying a $20 boat off of eBay and made a MOSFET-based motor controller to drive its dual thrusters. This design worked much better and after a bit of PID tuning, the boat was autonomously navigating between waypoints in the water. In the future [Vlad] plans to use the skills he learned on this project to make an autopilot for the 

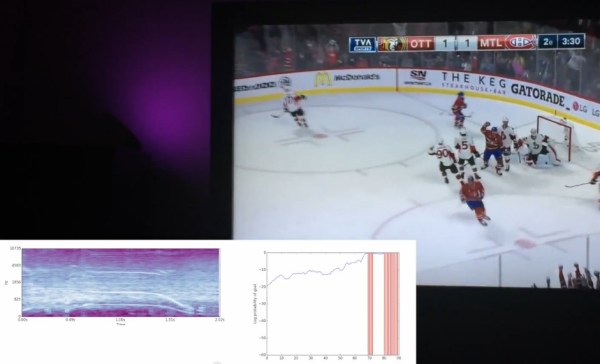
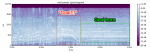 [François] started off by listening to the audio of some recorded games. Whenever a goal is scored, the commentator yells out and the goal horn is sounded. This makes it pretty obvious to the listener that a goal has been scored, but detecting it with a computer is a bit harder. [François] also wanted to detect when his home team scored a goal, but not when the opposing team scored, making the problem even more complicated!
[François] started off by listening to the audio of some recorded games. Whenever a goal is scored, the commentator yells out and the goal horn is sounded. This makes it pretty obvious to the listener that a goal has been scored, but detecting it with a computer is a bit harder. [François] also wanted to detect when his home team scored a goal, but not when the opposing team scored, making the problem even more complicated!









