Silicon has had a long run as the king of semiconductors, and why not? It’s plentiful and works well. However, working well and working ideally are two different things. In particular, electrons flow better than holes through the material. Silicon also is a poor heat conductor as we’ve all noticed when working with high-speed or high-power electronics. Researchers at MIT, the University of Houston, and other institutions are proposing cubic boron arsenide to overcome these limitations.
According to researchers, this material is a superior semiconductor and, possibly, the best possible semiconductor. Unfortunately, the material isn’t nearly as common as silicon. Labs have created small amounts of the material and there is still a problem with fabricating uniform samples.
Early experiments show the material has very high mobility for electrons and holes along with thermal conductivity almost ten times greater than that of silicon. It also has a good bandgap, making it very attractive as a semiconductor material. In fact, only diamond and isotopically enriched cubic boron nitride have better thermal conductivity.
However, there are still unknowns about how to use the material in practical devices. Long-term stability tests are as lacking. So maybe it will wipe out silicon or maybe it won’t. Time will tell.
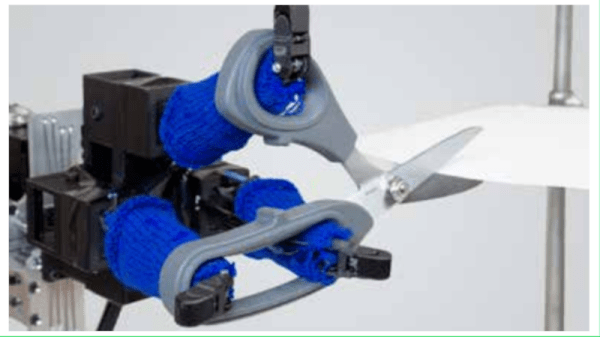
MIT complains that designing a robot hand is time-consuming and takes a lot of iterations. They want to improve that using a unique approach by giving a modular hand tactile sensors. They claim this can reduce the design time down to minutes for many practical applications. For example, cutting paper. You can see a video about the paper below as well as read the text itself.
Each style of manipulator has an associated graph. Predefined elements let you assemble a palm and specialized fingers. You deform the fingers to match the use of the hand. Then a sensor that looks like a mitten provides feedback fo the task.
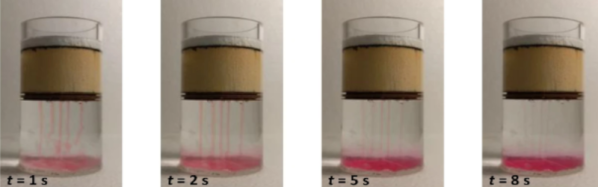
Researchers at MIT and in China have improved the old-fashioned solar still with a new inexpensive device that harnesses the sun to remove salt from water. Traditionally, these kinds of systems use a wick to draw water, but once the wick becomes fouled with salt, the device needs cleaning or other maintenance. Not exactly what you want in a survival situation. You can read the paper in Nature if you want more details.
The key to this new technique is black paint and polyurethane with 2.5-millimeter holes drilled in it. The idea is that warmer water above the insulating medium causes the salt to concentrate in the cooler water beneath the insulator allowing efficient vaporization of the water. As the water evaporates, it causes the salt concentration at the top to rise, which then sinks due to the higher density and lower-concentration salt water rises to the top to evaporate.
Because the materials are commonplace, the team says a one-meter-square system costs about $4 to produce. A system that size could provide a family’s daily drinking water.
So far, the prototype system has worked in the lab for at least a week without accumulating salt. The next challenge is to scale it to something more practical, but due to the low cost and simplicity of the system, it seems it would be easy enough to make that happen or to reproduce the device for your own testing.
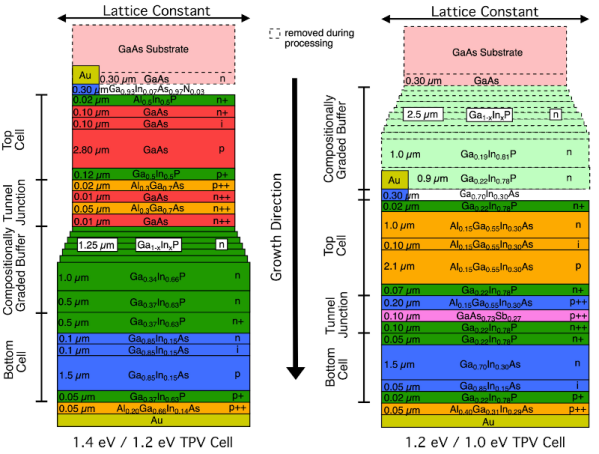
People generate lots of waste heat. It makes sense that there is a desire to convert that heat into usable energy. The problem is one of efficiency. Researchers from MIT and the National Renewable Energy Lab have announced a new heat converter that they claim has 40% efficiency. Of course, there’s a catch. The temperature range for the devices starts at 1,900 °C .
The thermophotovoltaic cells are tandem devices with two cells mated on one substrate. Each cell is multiple layers of very thin and somewhat exotic materials. So this probably isn’t something you will cobble up in your basement anytime soon unless you’re already manufacturing ICs down there. It appears that the secret is in the multiple layers including a reflective one that sends any missed photons back through the stack.
The paper is pretty dense, but there’s a Sunday-supplement summary over on the MIT site. Using heat storage leads to the ability to make heat batteries, more or less, and harness what would otherwise be waste energy.
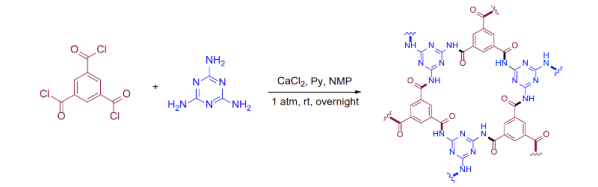
Chemical engineers at MIT have pulled off something that was once thought impossible. By polymerizing material in two different directions at once, they have created a polymer that is very strong. You can read a pre-print version of the paper over on Arxiv.
Polymers owe many of their useful properties to the fact that they make long chains. Molecules known as monomers join together in strings held together by covalent bonds. Polymer chains may be cross-linked which changes its properties, but it has long been thought that material that had chains going through the X and Y axis would have desirable properties, but making these reliably is a challenge.
Part of the problem is that it is hard to line up molecules, even large monomers. If one monomer in the chain rotates a bit, it will create a defect in the 2D structure and that defect will grow rapidly as you add more monomers. The new technique is relatively easy to do and is irreversible which is good because reversible chains tend to have undesirable characteristics like low chemical stability. Synthesis does require a few chemicals like melamine, calcium chloride, pyridine, and trimesic acid. Along with N-Methyl-2-pyrrolidone, the mixture eventually forms a gel. The team took pieces of gel and soaked it in ethanol. With some filtering, ultrasonics, centrifuging, and washing with water and acetone, the material was ready for vacuum drying and was made into a powder.
The powder is dissolved in acid and placed on a spinning silicon wafer to form a polymerized nanofilm. Other 2D films have been produced, of course, such as graphene, but polymer films may have a number of applications. In particular, in contrast to conventional polymers, sheets of this material are impermeable to gas and liquid, which could make it very useful as a coating.
According to the MIT press release, the film’s elastic modulus is about four and six times greater than that of bulletproof glass. The amount of force required to break the material is about twice that of steel. It doesn’t sound like this material will be oozing out of our 3D printers anytime soon. But maybe one day you’ll be able to get 2D super-strong resin.
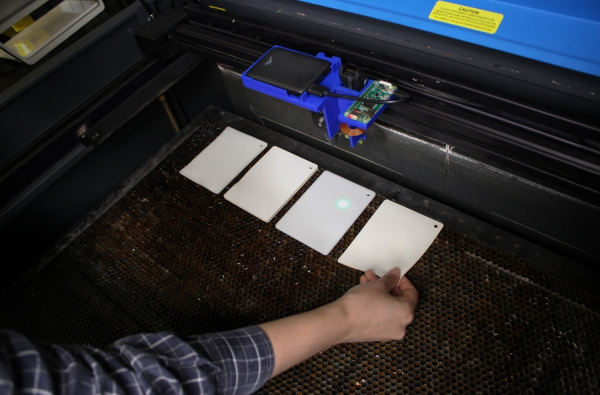
Come on now, admit it. You’ve done it. We’ve done it. You know — you were really sure that sheet of plastic stock you found lying around the hackerspace was acrylic right? You dialled in the settings, loaded the design, set the focus and pushed the little green ‘start’ button. Lots of black smoke, fire, and general badness ensued as you lunged for the red ‘stop’ button, before lifting the lid to work out how you’re going to clean this one up.
The technique makes use of so-called ‘speckle imaging’ where a material illuminated by a laser will produce a unique pattern of reflected spots, or speckles into a camera. By training a deep neural model with a large set of samples, it was found possible to detect up to 30 types of material with 98% accuracy.
The pre-baked model runs on a Raspberry PI zero with an off-the-shelf camera all powered from a power bank. This allows the whole assembly to simply drop onto an existing laser cutter head, with no wiring needed.
Even if you’re a seasoned laser cutter user, with a well-controlled stock pile, the peace-of-mind this could give would definitely be worth the effort. A more detailed description and more videos may be found by reading the full paper. Here’s hoping they release the system as open source, one day in the not-to-distant future. If not, then, you know what to do :)
The epicenter of the Chinese electronics scene drew a lot of attention this week as a 70-story skyscraper started wobbling in exactly the way skyscrapers shouldn’t. The 1,000-ft (305-m) SEG Plaza tower in Shenzhen began its unexpected movements on Tuesday morning, causing a bit of a panic as people ran for their lives. With no earthquakes or severe weather events in the area, there’s no clear cause for the shaking, which was clearly visible from the outside of the building in some of the videos shot by brave souls on the sidewalks below. The preliminary investigation declared the building safe and blamed the shaking on a combination of wind, vibration from a subway line under the building, and a rapid change in outside temperature, all of which we’d suspect would have occurred at some point in the 21-year history of the building. Others are speculating that a Kármán vortex Street, an aerodynamic phenomenon that has been known to catastrophically impact structures before, could be to blame; this seems a bit more likely to us. Regardless, since the first ten floors of SEG Plaza are home to one of the larger electronics markets in Shenzhen, we hope this is resolved quickly and that all our friends there remain safe.
In other architectural news, perched atop Building 54 at the Massachusetts Institute of Technology campus in Cambridge for the last 55 years has been a large, fiberglass geodesic sphere, known simply as The Radome. It’s visible from all over campus, and beyond; we used to work in Kendall Square, and the golf-ball-like structure was an important landmark for navigating the complex streets of Cambridge. The Radome was originally used for experiments with weather radar, but fell out of use as the technology it helped invent moved on. That led to plans to remove the iconic structure, which consequently kicked off a “Save the Radome” campaign. The effort is being led by the students and faculty members of the MIT Radio Society, who have put the radome to good use over the years — it currently houses an amateur radio repeater, and the Radio Society uses the dish within it to conduct Earth-Moon-Earth (EME) microwave communications experiments. The students are serious — they applied for and received a $1.6-million grant from Amateur Radio Digital Communications (ARDC) to finance their efforts. The funds will be used to renovate the deteriorating structure.
Well, this looks like fun: Python on a graphing calculator. Texas Instruments has announced that their TI-84 Plus CE Python graphing calculator uses a modified version of CircuitPython. They’ve included seven modules, mostly related to math and time, but also a suite of TI-specific modules that interact with the calculator hardware. The Python version of the calculator doesn’t seem to be for sale in the US yet, although the UK site does have a few “where to buy” entries listed. It’ll be interesting to see the hacks that come from this when these are readily available.
Did you know that PCBWay, the prolific producer of cheap PCBs, also offers 3D-printing services too? We admit that we did not know that, and were therefore doubly surprised to learn that they also offer SLA resin printing. But what’s really surprising is the quality of their clear resin prints, at least the ones shown on this Twitter thread. As one commenter noted, these look more like machined acrylic than resin prints. Digging deeper into PCBWay’s offerings, which not only includes all kinds of 3D printing but CNC machining, sheet metal fabrication, and even injection molding services, it’s becoming harder and harder to justify keeping those capabilities in-house, even for the home gamer. Although with what we’ve learned about supply chain fragility over the last year, we don’t want to give up the ability to make parts locally just yet.
And finally, how well-calibrated are your fingers? If they’re just right, perhaps you can put them to use for quick and dirty RF power measurements. And this is really quick and really dirty, as well as potentially really painful. It comes by way of amateur radio operator VK3YE, who simply uses a resistive dummy load connected to a transmitter and his fingers to monitor the heat generated while keying up the radio. He times how long it takes to not be able to tolerate the pain anymore, plots that against the power used, and comes up with a rough calibration curve that lets him measure the output of an unknown signal. It’s brilliantly janky, but given some of the burns we’ve suffered accidentally while pursuing this hobby, we’d just as soon find another way to measure RF power.