Everyone is familiar with pinwheels, and few of us haven’t crafted one from a square of paper, a stick, and a pin. Pinwheels are pretty optimized from a design standpoint, and are so cheap and easy to build that putting a pinwheel to work as an HVAC duct flow meter seems like a great idea.
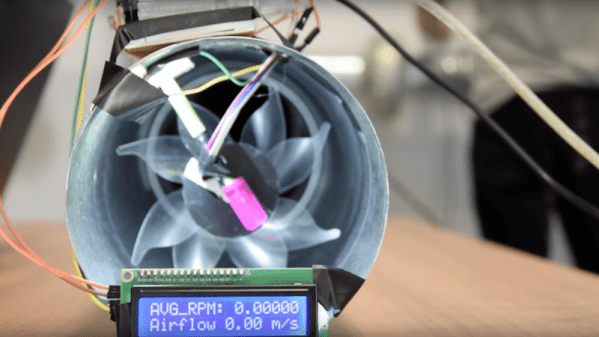
Great in theory, perhaps, but as [ItMightBeWorse] found out, a homemade pinwheel is far from an ideal anemometer. His experiments in air duct flow measurements, which previously delved into ultrasonic flow measurement, led him to try mechanical means. That calls for some kind of turbine producing a signal proportional to air flow, but a first attempt at using a computer fan with brushless DC motor failed when a gentle airflow couldn’t overcome the drag introduced by the rotor magnets. But a simple pinwheel, custom cut from patterns scaled down from a toy, proved to be just the thing. A reflective optosensor counts revolutions as the turbine spins in an HVAC duct, and with a little calibration the rig produces good results. The limitations are obvious: duct turbulence, flimsy construction, and poor bearings. But for a quick and dirty measurement, it’s not bad.
Looking for an outdoor anemometer rather than an HVAC flow meter? We’ve got one made from an old electric motor, or a crazy-accurate ultrasonic unit.
Continue reading “Custom Cut Pinwheel Makes A Useful HVAC Duct Flow Meter”