The more people we have on this planet, the more food we need. Naturally, this extends to water, another precious resource that generally plays a part in farming and food production. And honestly, we’d probably all eat  a little better if it were really easy to grow healthy things like spinach. Well, that excuse doesn’t work anymore, thanks to [J Gleyzes]’ Ultratower. It’s a simple-to-use hydroponic tower that uses recycled mist to water plants, ultimately saving water in the process.
a little better if it were really easy to grow healthy things like spinach. Well, that excuse doesn’t work anymore, thanks to [J Gleyzes]’ Ultratower. It’s a simple-to-use hydroponic tower that uses recycled mist to water plants, ultimately saving water in the process.
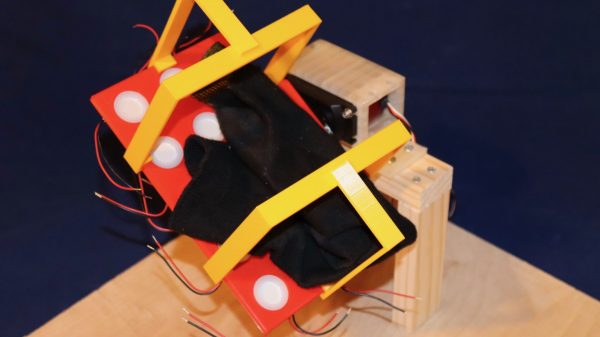
The ‘ultra’ part is a function of the way mist is created. In this case, it’s done with three piezoelectric disks mounted under a tank in the top of the PVC tube. Stick up to twelve plants in the little cubbies, and their roots will grow down the inside, where they’ll receive a fine shower of water at your command. Water that runs off the roots collects in a small tank at the bottom, where a pump starts the process over again.
At first, [J Gleyzes] had trouble with the piezo disks — using 1.7MHz disks created too much heat, warming the water up to nearly 40°C (104°F). Since cooking the spinach prematurely would be bad, they experimented with other values, finally landing on 108KHz. Be sure to check out the video after the break.
Continue reading “Hackaday Prize 2022: Ultratower Is A Powerful Gardening Vertical”