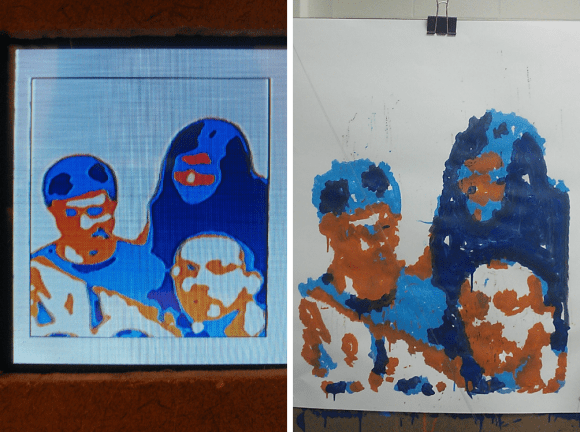
[Ben], [David], [Drew], [Kayla], and [Peter] built a robotic artist as their senior design project. This mashes up a bunch of different project ideas, but the thing we like the most about it is that it works much like a photo booth that produces a painting. A Raspberry Pi uses a webcam to snap the picture, converts the image to three colors (plus the white background of the canvas) and sets the robot in motion. The team laments that initial testing of the completed project (seen in the clip below) worked out quite well but took hours to produce the painting. What do they expect? It’s art!
This is quite a bit different from the WaterColorBot (whose manufacturing process we just looked in on yesterday). WaterColorBot uses a flat canvas and a gantry system. This offering, which is called PICASSAU, uses an upright canvas with the paintbrush mounted in much the same way as a plotter robot. The biggest difference is that there is the ability to pivot the paint brush in order to pick up more paint, and for cleaning in between color changes.