Deep in the recesses of a few enterprising hackerspaces, you’ll find old electronic knitting machines modified for use with modern computers. They’re cool, and you can knit colorful designs, but all of these machines are ultimately based on old equipment, and you’ll have a hard time building one for yourself.
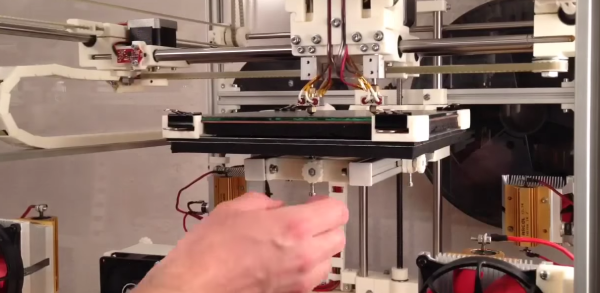
For their entry to the Hackaday Prize, [Mar] and [Varvara] is building a knitting machine from scratch. Not only is it a 3D printed knitting machine anyone can build given enough time and plastic, but this machine is a circular knitting machine, something no commercial offering has yet managed.
We saw [Mar] and [Varvara]’s Circular Knitic last January, but this project has quite the pedigree. They originally started on their quest for a modern knitting machine by giving a new brain to old Brother machines. This was an incredible advancement compared to earlier Brother knitting machine hacks; before, everyone was emulating a floppy drive on a computer to push data to the machine. The original Knitic build did away with the old electronics completely, replacing it with a homebrew Arduino shield.
While the Circular Knitic isn’t completely 3D printed, you can make one in just about any reasonably equipped shop. It’s a great example of a project that’s complex and can be replicated by just about anyone, and a perfect example of a project for The Hackaday Prize.
Check out the video of the Circular Knitic below.
Continue reading “Hackaday Prize Entry: Circular Knitting Machines”


 Before you go off your rocker… we’re definitely not calling this real. It’s a proof of concept at best, but that doesn’t prevent us from getting excited. How long have you been waiting for robots that can build entire structures on our behalf? We were excited at the prospect of
Before you go off your rocker… we’re definitely not calling this real. It’s a proof of concept at best, but that doesn’t prevent us from getting excited. How long have you been waiting for robots that can build entire structures on our behalf? We were excited at the prospect of 

![[Matt] leading Zero to Product workshop](https://i0.wp.com/hackaday.com/wp-content/uploads/2015/06/sz-workshop-matt.png?w=292&h=165&ssl=1 "sz-workshop-matt")