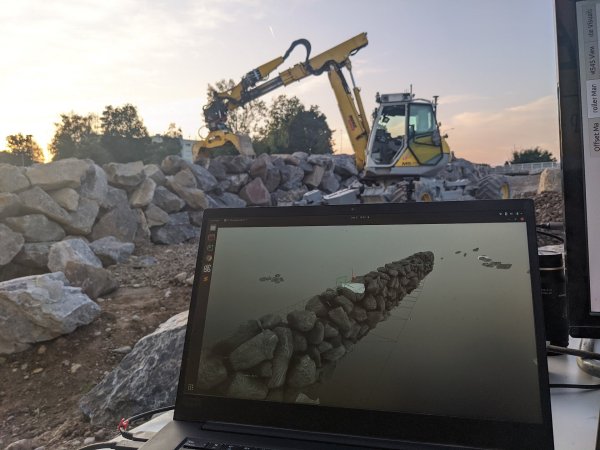
In a move that aims to further the circular economy of the construction industry, researchers at ETH Zurich have let an autonomous excavator loose on a big pile of boulders and reclaimed concrete. The goal? To build a 20 foot (6 meter) and 213 ft (65 m) long dry-stone wall as part of a park where the landscape was digitally planned, and the earth autonomously excavated.
 The coolest thing about the Menzi Muck excavator is the software, which is explored in the video after the break. Thanks to a bunch of sensors, the excavator can not only draw a 3D map of the site, it can find in situ boulders dotting the landscape and incorporate them into the wall.
The coolest thing about the Menzi Muck excavator is the software, which is explored in the video after the break. Thanks to a bunch of sensors, the excavator can not only draw a 3D map of the site, it can find in situ boulders dotting the landscape and incorporate them into the wall.
Machine vision allows the excavator to grab the stones and assess their size and shape, as well as approximate their weight and center of gravity.
Then, an algorithm determines the best place for each stone and places them there without using mortar or cement. Menzi Muck is capable of number-crunching 20 to 30 stones at a time, which coincidentally is about the number in one delivery.
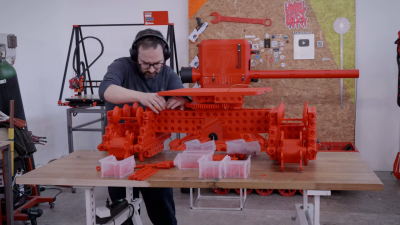
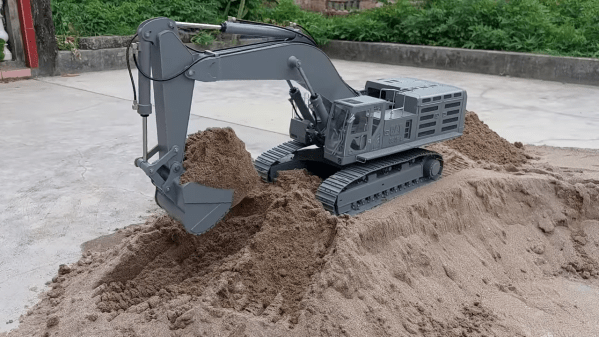
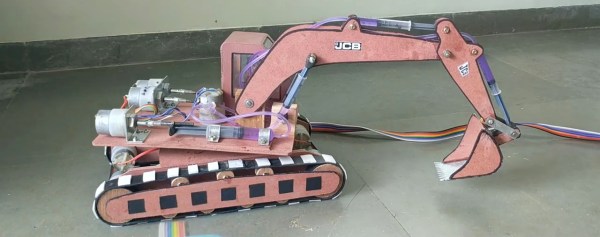
Want to build your own excavator? Check out this finely-detailed R/C excavator for top-notch inspiration.
Continue reading “Autonomous Excavator Builds Stone Wall Algorithmically”