It’s not transparent aluminum, exactly, but it might be even better: transparent wood. Scientists at the University of Maryland have devised a way to remove all of its coloring, leaving behind an essentially clear piece of wood.
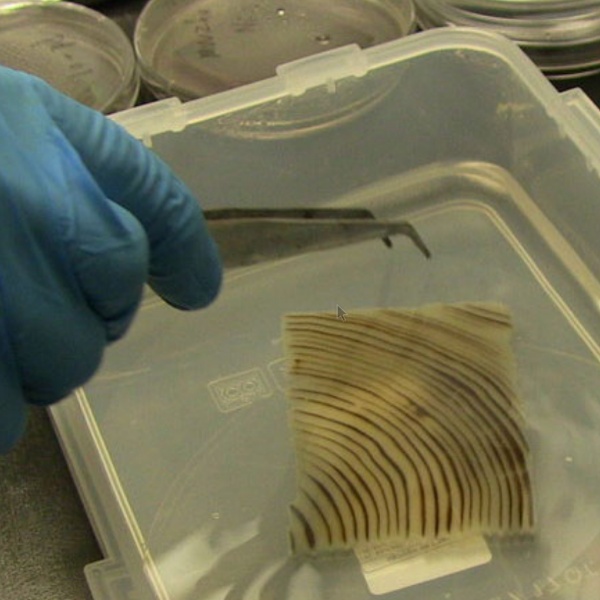 By boiling the block of wood in a NaOH and Na2SO chemical bath for a few hours the wood loses its lignin, which is gives wood its color. The major caveat here is that the lignin also gives wood strength; the colorless cellulose structure that remains is itself very fragile. The solution is to impregnate the transparent wood with an epoxy using about three vacuum cycles, which results in a composite that is stronger than the original wood.
By boiling the block of wood in a NaOH and Na2SO chemical bath for a few hours the wood loses its lignin, which is gives wood its color. The major caveat here is that the lignin also gives wood strength; the colorless cellulose structure that remains is itself very fragile. The solution is to impregnate the transparent wood with an epoxy using about three vacuum cycles, which results in a composite that is stronger than the original wood.
There are some really interesting applications for this material. It does exhibit some haze so it is not as optimally transparent as glass but in cases where light and not vision is the goal — like architectural glass block — this is a winner. Anything traditionally build out of wood for its mechanical properties will be able to add an alpha color channel to the available options.
The next step is finding a way to scale up the process. At this point the process has only been successful on samples up to 1 centimeter thick. If you’re looking to build a starship out of this stuff in the meantime, your best bet is still transparent aluminum. We do still wonder if there’s a way to eliminate the need for epoxy, too.