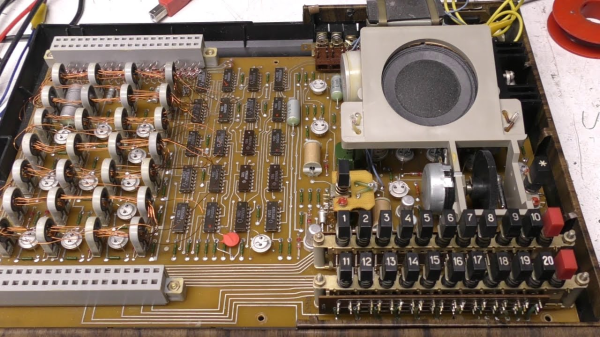
We’ve seen a few interesting magnetic core memories on these fine pages over the years, but we don’t recall seeing too many user programmable magnetic core memory devices. This interesting Russian telephone auto dialer in its day would have been a very useful device, capable of storing and dialing forty user programmable 7-digit numbers. [mikeselectricstuff] tore into one (video, embedded below), and found some very interesting tech. For its era, this is high technology stuff. Older Russian tech has a reputation for incredibly ingenious use of older parts, that can’t be denied. After all, if it works, then there’s no need to change it. But anyway, what’s interesting here is how the designers decided to solve the problem of programming and recalling of numbers, without using a microprocessor, by using discrete logic and core rope memory.
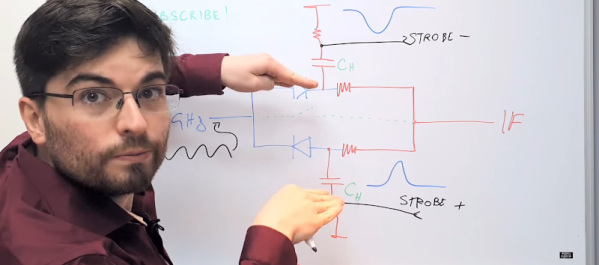
This is the same technology used by the Apollo Guidance Computer, but in a user configurable form, and obviously much smaller storage capacity. The core array consists of seven, four-bit words, one word per telephone digit, which will be read out sequentially bottom to top. The way you program your number is to take your programming wire, insert it into the appropriate hole (one row related to numbers 1-20, the other row is shifted 1-20 for the second bank) and thread it along the cores in a weave type pattern. Along the way, the wire is passed through or bypasses a particular core, depending upon the digit you are coding for. They key for this encoding is written on the device’s lid. At the end, you then need to terminate the wire in the matching top connector, to allow the circuit to be completed.
As far as we can tell, the encoding is a binary sequence, with a special ‘stop’ code to indicate telephone numbers with less than seven digits. We shall leave further analysis to interested parties, and just point you at the Original manufacturer schematics. Enjoy!
Of course we’re not just going to mention rope core memory and the AGC without linking to a fantastic article about the very same, and if that’s wetting your appetite for making a rope core memory, here’s a little thing about that too!
Continue reading “Soviet-Era Auto Dialler Uses Magnetic Rope Core Memory” →