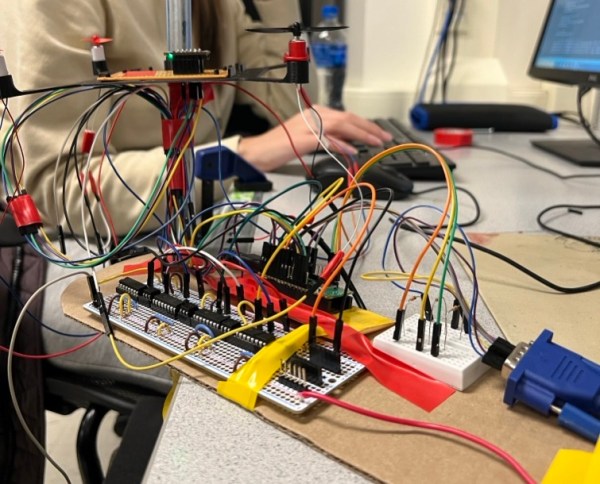
What’s the cheapest quadcopter you can build? As [Circuit Digest] demonstrates with their variant of the ESP-Drone project by Espressif, you only need a minimum of parts: an ESP32 MCU, an inertial measurement unit (IMU) such as the MPU6050, and four MOSFETs to drive the brushless DC motors. As the PCB also forms the structural frame and landing struts for the quadcopter, not even a 3D printer is needed. All told, [Circuit Digest] figures the total BOM comes in at around 1,000 Indian Rupees, or about $12 USD.

While this [Circuit Digest] project provides basic IMU functionality, the Espressif project also has a few expansion boards detailed on its hardware page, depending on the base model of the mainboard you pick. The [Circuit Digest] project follows the ESPlane-V2-S2 version with no expansion boards, but the ESP32-S2-Drone V1.2 mainboard can be extended with position-hold, pressure and compass modules, as well as custom boards.
As a derivative of the Bitcraze Crazyflie project, the ESP-Drone firmware also supports the rather nifty cfclient software for remote monitoring, logging and control. This may also be in the [Circuit Digest] firmware, but wasn’t listed among the features.
Continue reading “ESP-Drone: Building An ESP32-Based Quadcopter For Not Much Cash”