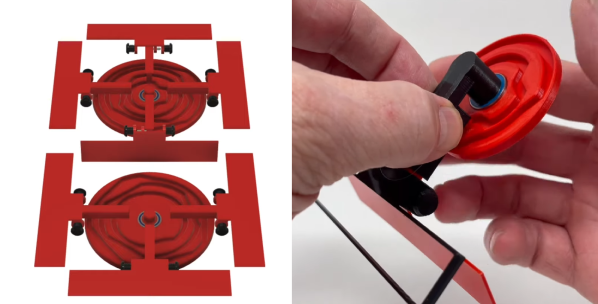
Pin art is one of those things that simply cannot be left alone if it’s within arms reach, and inevitably end up with a hand or face imprint. [hugs] is also fascinated by them, so he designed the PinThing, a mechanized pin art display.
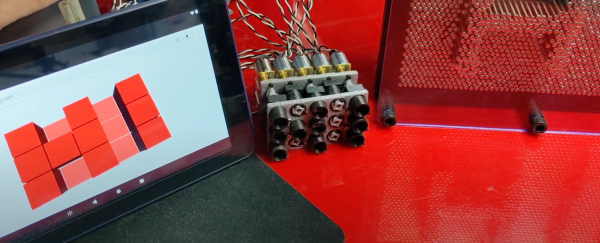
The PinThing pin diameters are much larger than standard pin art, but this is to fit small geared DC motors. Each pin is a short 3D-printed lead screw mechanism. The motors are driven with a stack of motor driver shields on top of an Arduino Uno, which uses Firmata to receive instructions over serial from a Node.js app using the Johnny-Five library. This may be a simple 3×5 proof of concept, but then it could be used for everything from displays to interactive table surfaces.
One of the challenges with pixelated mechanical displays like this, the inFORM from MIT, or even flip dot displays, are the costs in actuators and driver electronics. A small 10×10 array requires 100 motors and drivers, which quickly adds up as you expand, even if individual components are quite cheap.
If you are willing to sacrifice instantaneous response from each pixel, you can use a mechanical multiplexer. It consists of some sort of moving carriage behind the display with mounted actuators, so you’ll only need an actuator per row, not for every pin. This also means the pins can be closer together since the actuators can be staggered on the carriage.
PinThing project was an entry to the Rethink Displays Challenge of the 2021 Hackaday Prize, for which the finalists were just announced.