Although spying is a time-honored tradition, the sheer scope of it reached a fever pitch during the Cold War, when everyone was spying on everyone, and conceivably for both sides at the same time. In an era where both McCarthyism and the character of James Bond enjoyed strong popularity, it should come as no surprise that a project of geopolitical importance like the development of the world’s first supersonic airliner would come amidst espionage, as well as accusations thereof.
This is the topic of a documentary that recently aired on Channel 4 in the UK called Concorde: The Race for Supersonic, yet what is the evidence that the Soviet Tu-144 truly was just a Concorde clone, a derogatory nicknamed ‘Concordski’?
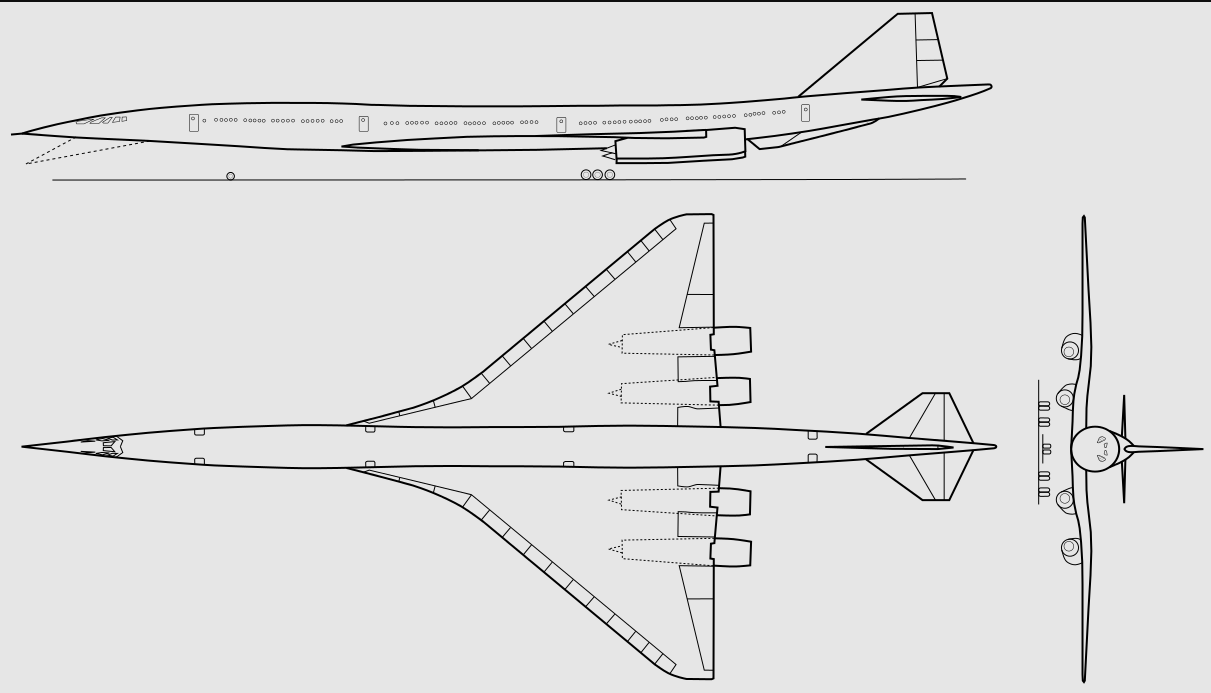
At the time that the Concorde was being developed, there wasn’t just the competition from the Tu-144 team, but also the Boeing 2702 (pictured) and Lockheed L-2000, with the latter two ultimately being cancelled. Throughout development, all teams converged on a similar design, with a delta wing and similar overall shape. Differences included the drooping nose (absent on Boeing 2707-300) and use of canards (present on Tu-144 and 2707-200), and wildly different engines, with the production Tu-144S requiring an afterburner on its Kuznetsov NK-144A engines just like the Concorde, before the revised Tu-144D removing the need for afterburners with the Koliesov RD36-51 engines.
Although generally classified as a ‘failure’, the Tu-144’s biggest issues appear to have been due to the pressure on the development team from Soviet leadership. Once the biggest issues were being fixed (Tu-144D) it saw continued use for cargo use and even flying missions for NASA (Tu-144LL) until 1999. Although Soviet spies were definitely caught with Concorde blueprints, the practical use of these for the already overburdened Tu-144 development team in terms of reverse-engineering and applying it to the Tu-144’s design would be limited at best, which would seem to be reflected in the final results.
Meanwhile, although supersonic airliners haven’t been flying since the Concorde retired in 2003, the Lockheed Martin X-59 Quesst supersonic airplane that is being built for NASA looks set to fix the sonic boom and fuel usage issues that hampered supersonic flight. After the L-2000 lost to Boeing so many decades ago, it might be Lockheed that has the last laugh in the race towards supersonic flight for airliners.
Top image: Tu-144 with distinctive droop nose at the MAKS-2007 exhibition)