
[XenonJohn] is not a newcomer to the world of self balancing vehicles. He was part of the Medicycle team and a semifinalist for The Hackaday Prize. Working on the Medicycle had exposed some opportunities for improvement of the design, the most significant being the single wide wheel supporting the vehicle and rider. The unicycle design was more difficult to learn to ride than that of a two-wheeled nature. [XenonJohn] wanted to make an improved self balancer and this new one will have two wheels that are independently controlled.
Although the finished product looks like it started with a bike frame, the self-balancer’s frame is actually completely custom. The handlebars and banana seat were purchased new as aftermarket parts for old-style bicycles. Powering the two wheels is a pair of 24v brushed motors, conveniently each one came with a 6:1 reduction gearbox pre-installed. The wheels are a complete compilation of parts not intended to go together. The BMX bike rims were laced to mountain bike front hubs. The hubs have provisions for a disk brake but [XenonJohn] mounted a large toothed pulley there instead. A belt then connects the drive motor gearboxes to the pulleys completing the drive train.
The LiFePO4 battery kit was purchased off eBay and puts out 24v and 15AH using eight cells. These batteries alone were a hefty percentage of the projects cost, costing nearly $300. Controlling the vehicle is an Arduino Mega that makes use of the FreeSix IMU library. The Mega receives inputs via I2C from a Sparkfun SEN-10121 board that contains both accelerometers and gyroscopes along with turn switches connected to the ‘brake’ levers on the handlebars. The Arduino then sends commands to the 25 amp Sabertooth motor controllers to keep you balanced as you buzz around town.
Video below.
Continue reading “Self Balancing Vehicle Inspired By Bicycles Of Yesteryear”
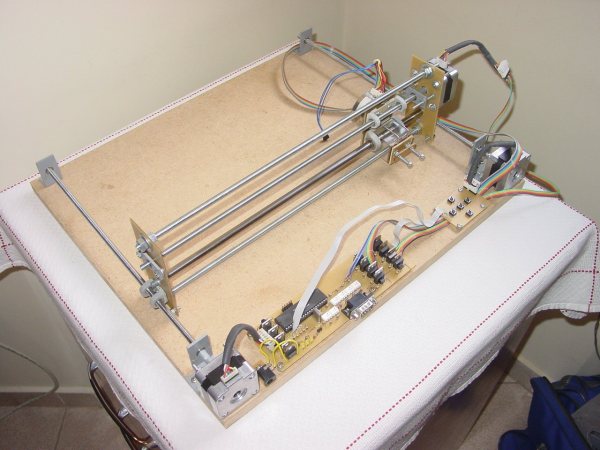
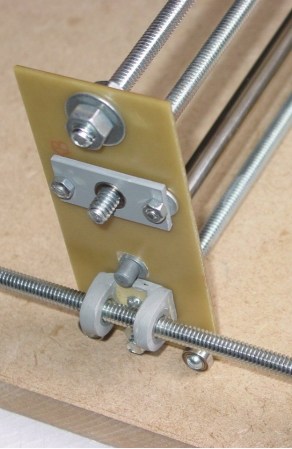 As unique as the X axis is, the Y sure gives it a run for its money. No linear rails are used, two lead screws are the only things that maintain the gantry’s position. To prevent gravity from pulling the gantry down and bending the Y axis lead screws, there are a couple of bearings on either side that ride along the bed of the machine. The frame material also hits the cheap target, it’s made from blank PCB board. A PIC16F877 microcontroller and a handful of mosfets control the motors. [msassa11] built this control circuit but admits it’s performance is not that great, it’s noisy and loses torque at high speed.
As unique as the X axis is, the Y sure gives it a run for its money. No linear rails are used, two lead screws are the only things that maintain the gantry’s position. To prevent gravity from pulling the gantry down and bending the Y axis lead screws, there are a couple of bearings on either side that ride along the bed of the machine. The frame material also hits the cheap target, it’s made from blank PCB board. A PIC16F877 microcontroller and a handful of mosfets control the motors. [msassa11] built this control circuit but admits it’s performance is not that great, it’s noisy and loses torque at high speed.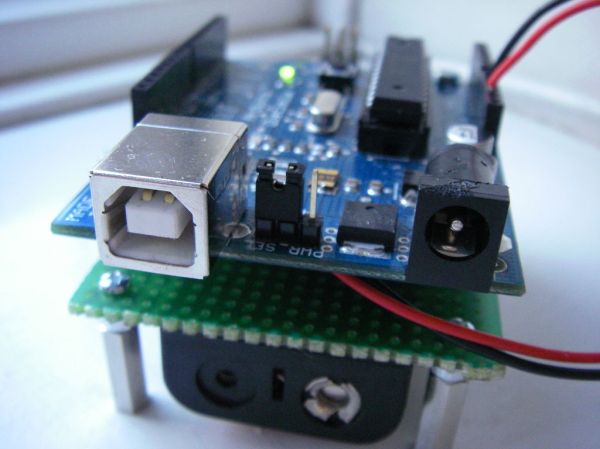

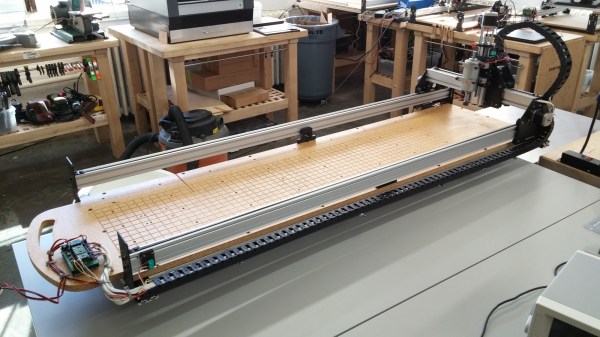
 The project started off with some stock Shapeoko 2 parts. Achieving the deck-cutting size required shortening the X Axis and tripling the length of the Y Axis resulting in a 250 x 1200mm work envelope. The DC spindle used accepts ER16 collets and has a fully variable speed control. The stand alone selectable 24/48 volt power supply has a neat DIY handle to ease transportation. Even though the router itself has skateboard trucks, it also has a handle at the front so it’s easy to grab and drag behind you.
The project started off with some stock Shapeoko 2 parts. Achieving the deck-cutting size required shortening the X Axis and tripling the length of the Y Axis resulting in a 250 x 1200mm work envelope. The DC spindle used accepts ER16 collets and has a fully variable speed control. The stand alone selectable 24/48 volt power supply has a neat DIY handle to ease transportation. Even though the router itself has skateboard trucks, it also has a handle at the front so it’s easy to grab and drag behind you.









