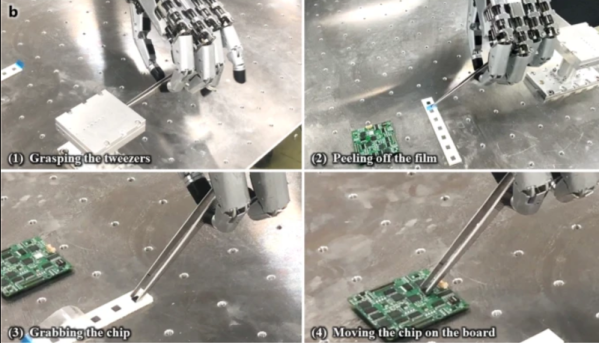
Korean researchers have created a very realistic and capable robot hand that looks very promising. It is strong (34N of grip strength) and reasonably lightweight (1.1 kg), too. There are several videos of the hand in action, of which you can see two of them below including one where the hand uses scissors to cut some paper. You can also read the full paper for details.
Postpone your holiday shopping and spend some quality time with editors Mike Szczys and Elliot Williams as they sift through the week in Hackaday. Which programming language is the greenest? How many trackballs can a mouse possibly have? And can a Bluetooth dongle run DOOM? Join us to find out!
Take a look at the links below if you want to follow along, and as always, tell us what you think about this episode in the comments!
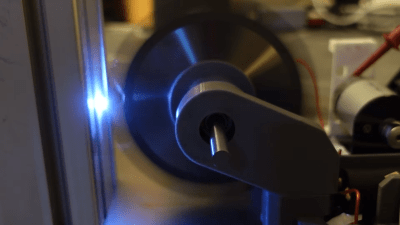
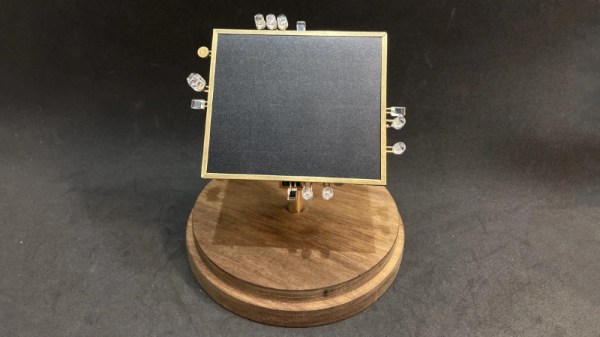
BEAM robotics, which stands for Biology, Electronics, Aesthetics, and Mechanics, is an ethos that focuses on building robots with simple analog circuits. [NanoRobotGeek] built a great example of the form, creating a light-tracking robot that uses no batteries and no microcontrollers.
The robot aims to track the brightest source of light it can see. This is achieved by feeding signals from four photodiodes into some analog logic, which then spits out voltages to the two motors that aim the robot, guiding it towards the light. There’s also a sound-detection circuit, which prompts the robot to wiggle when it detects a whistle via an attached microphone.
The entire circuitry is free-formed using brass wire, and the result is an incredibly artful build. Displayed in a bell jar, the build looks like some delicate artifact blending the past and future. Neither steampunk nor cyberpunk, it draws from both with its combination of vintage brass and modern LEDs.
It’s a great build that reminds us of some of the great circuit sculptures we’ve seen lately. Video after the break.
Have you ever been walking around the house, desperate to know the ambient temperature, humidity, and barometric pressure? Have you ever wanted to capture that data with a small remote-controlled platform? If so, this project from [TUENHIDIY] will be exactly what you’ve been looking for.
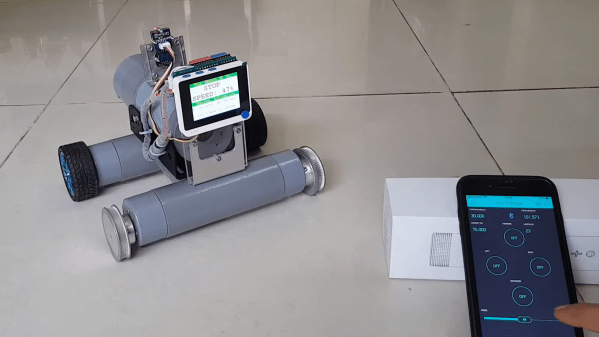
The little remote-control car is built around a Seeed Wio Terminal. This is a microcontroller platform that comes with a screen already attached, along with wireless hardware baked in and Grove connectors for hooking up external modules. Thus, the car adds a DHT11 temperature and humidity sensor, along with a BMP280 air pressure sensor using the Grove connectors.
Driving the car is done via a Blynk smartphone app that communicates with the Wio Terminal. Small DC motors at each wheel are driven via a DFRobot quad-motor shield. With the built-in screen, the RC car displays commands received from the smartphone app, as well as the temperature, humidity and pressure in the immediate environment.
We really like the simple PVC-based chassis design, and it’s a straightforward project that demonstrates how to build a Bluetooth-controlled car. Data collected by the sensors is also visible on the smartphone app, so if you need to sample conditions in the next room without getting off the couch, you could do that pretty easily.
Projects like these are a good way to get familiar with working with motors and sensors. It’d be a great base for simple robotics development, too. We’ve featured builds from [TUENHIDIY] before, too, like this great rotary plotter that can draw on bottles. Video after the break.
Hackaday editors Mike Szczys and Elliot Williams catch up on a week’s worth of hacks. Get a grip on robot hands: there’s an eerily human one on offer this week. If you’re doing buck/boost converter design, the real learning is in high-frequency design patterns that avoid turning your circuits into unintentional radiators. Those looking for new hobbies might want to take up autonomous boat racing. We saw a design that’s easy enough to print on the average 3D printer — and who doesn’t want to build their own jet boat? We’ll wrap up the episode by digging into magnesium sources, and by admiring the number of outfits who are rolling their own silicon these days.
Take a look at the links below if you want to follow along, and as always, tell us what you think about this episode in the comments!
ZAP! The saw is capable of delivering high-voltage discharges to damage its foes.
Combat robots come in all shapes and sizes, with regulating authorities often using weight limits to create a level playing field for competitors. [Hans Jørgen Grimstad] is building a robot to compete in a 4 kg class, and made some interesting design decisions to that end.
4 kg is not a lot of weight to play with. When considering the motors needed to propel the robot and the batteries needed to run everything, there’s then precious little weight left for weapons systems and armor plating.
Thus, in an effort to make the most of the weight limitations, [Hans] decided to use carbon fiber for the robot’s outer shell. The method used is a simple wet layup in a mold. We’d be supremely interested to see how this armor holds up in competition, versus more typical choices like aluminium and steel.
Other interesting features include a belt-driven saw, which [Hans] tests with his hands mere inches away and the robot’s motors powered up. Don’t do this if you value your fingers. This is paired with a high-voltage discharge taser module. When the saw gets close to another robot, it may cause sparks to jump to the enemy, damaging its electronics in the process. It’s something we haven’t seen too often, as such measures are actually banned in some contests.
Diehard enthusiasts in the battle robot community will likely have fierce opinions on many points of the design; have it out in the comments. It’s certainly not the first carbon-fiber bot, but it’s nice to see the fancy material being thrown in the ring.
We’ve seen other designers innovate, too, such as this remarkably successful walking robot build. Video after the break.
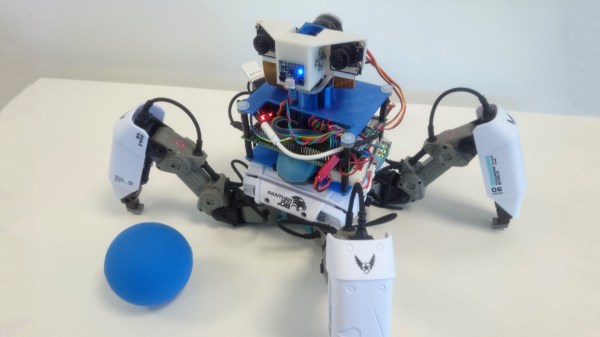
The Mekamon from Reach Robotics is a neat thing, a robot controlled by a phone app that walks on four legs. [Wes Freeman] decided to hack the platform, giving it a sensor package and enabling some basic autonomous behaviours in the process.
[Wes] started out by using a packet sniffer to figure out the command system for controlling the Mekamon robot over Bluetooth. Then, he set about fitting a Raspberry Pi 3 on the ‘bot, along with a Pi Camera on a gimballed camera head.
Running OpenCV on the Raspberry Pi gives the Mekamon robot the ability to follow a colored ball placed in its field of vision. Later work involved upgrading the hardware to a Pi Compute Module 3, with its dual camera inputs allowing for the use of a stereo imaging setup.
All the parts simply ziptie on top of the original robot, with no permanent changes needed. It’s a neat way of hacking, by expanding the original capabilities without actually having to tamper within.
We’ve seen plenty of autonomous builds over the years, from farming robots to those designed to explore the urban environment. Video after the break.

 The robot aims to track the brightest source of light it can see. This is achieved by feeding signals from four photodiodes into some analog logic, which then spits out voltages to the two motors that aim the robot, guiding it towards the light. There’s also a sound-detection circuit, which prompts the robot to wiggle when it detects a whistle via an attached microphone.
The robot aims to track the brightest source of light it can see. This is achieved by feeding signals from four photodiodes into some analog logic, which then spits out voltages to the two motors that aim the robot, guiding it towards the light. There’s also a sound-detection circuit, which prompts the robot to wiggle when it detects a whistle via an attached microphone.