Looking to improve the quality of your 3D prints? Worried about peeling, warping, and de-laminating layers? All you need is to do is make a heated build chamber!
The heated build chamber is one of the patents that the big 3D printer company owns (we won’t point any fingers), and that’s why you don’t see it as a feature on any of the “consumer” grade 3D printers. But that won’t stop people from making their own!
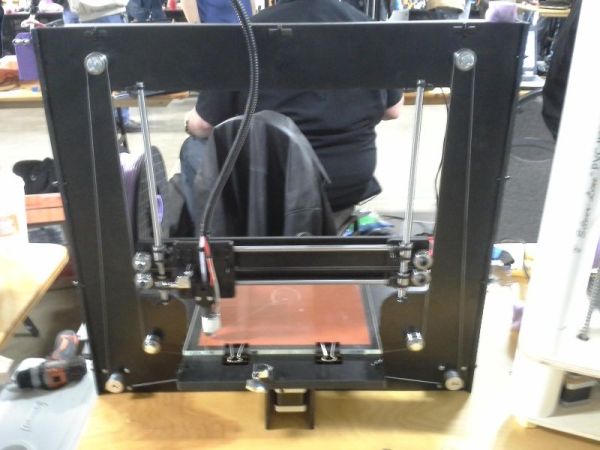
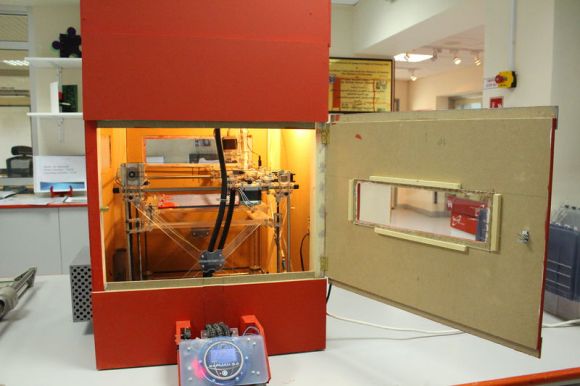
[Repkid] just finished a wiki page on this topic, and it’s a great way to build a heated chamber — if you have the space for it! He’s built a large wooden enclosure for his RepRap out of MDF sheets. Double-ply cardboard is used as thin insulation, although we imagine if you’re building something this large you might as well use some commercial insulation.
The chamber is heated by a blow dryer which is mounted off the back of the box, and the heat is controlled by changing the speed setting of the dryer. A laser cut vent allows for further adjustment. If you want to get really fancy, it would be very easy to install a thermostat PID controller that could regulate the temperature more accurately. To prevent overheating the electronics, all the control boards are also outside of the box.
Continue reading “Heated Build Chambers Don’t Have To Be That Complex”