Last month, GitHub users were able to buy a special edition Universal 2nd Factor (U2F) security key for just five bucks. [Yohanes] bought two, but wondered if he could bring U2F to other microcontrolled devices. he ended up building a U2F key with a Teensy LC, and in the process brought U2F to the unwashed masses.
Universal 2nd Factor is exactly what it says on the tin: it doesn’t replace your password, but it does provide a little bit of extra verification to prove that the person logging into an account is indeed the person that should. Currently, Google (through Gmail and Google Drive), Github, Dropbox, and even WordPress (through a plugin) support U2F devices, so a tiny USB key that’s able to provide U2F is a very useful device.
After digging into the U2F specification [Yohanes] found the Teensy LC would be a perfect platform for experimentation. A U2F device is just a USB HID device, which the Teensy handles in spades. A handy library takes on ECC for both AVR and ARM platforms and [Yohanes’] finished U2F implementation is able to turn the Teensy LC into something GitHub was selling for $5.
It should be noted that doing anything related to security by yourself, with your own code is dumb and should not be considered secure. Additionally, [Yohanes] didn’t want to solder a button to his Teensy LC, so he implemented everything without a button press, which is also insecure. The ‘key handle’ is just XOR encryption with a fixed key, which is also insecure. Despite this, it’s still an interesting project and we’re happy [Yohanes] shared it with us.





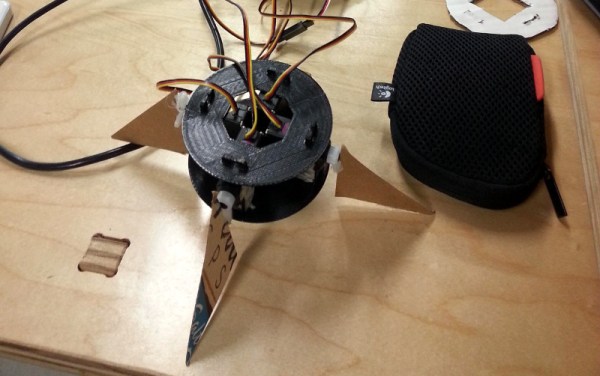
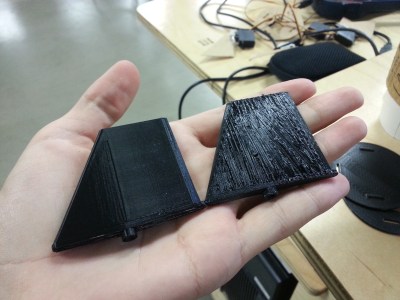 [Arsenio]’s design targets amateur rockets with a fuselage diameter of four inches or so. The main control module is just a cylinder with four servos mounted along the perimeter and some fancy 3D printed fins bolted onto the servo. These are controlled by an Arduino and a 6DOF IMU that’s able to keep the rocket pointing straight up.
[Arsenio]’s design targets amateur rockets with a fuselage diameter of four inches or so. The main control module is just a cylinder with four servos mounted along the perimeter and some fancy 3D printed fins bolted onto the servo. These are controlled by an Arduino and a 6DOF IMU that’s able to keep the rocket pointing straight up.