As the many many warnings at the base of the Open Surgery website clearly state, doing your own surgery is a very bad idea. However, trying to build a surgery robot like Da Vinci to see if it can be done cheaply, is a great one.
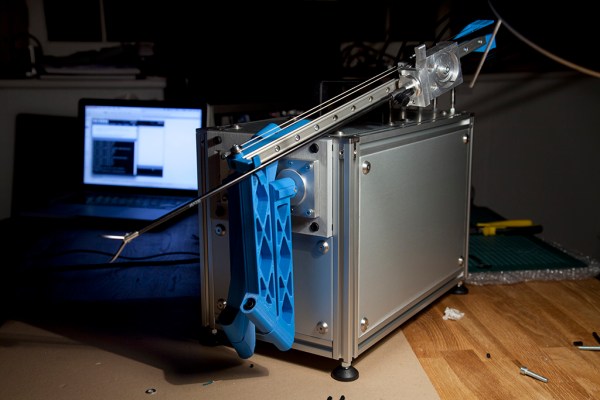
For purely academic reasons, [Frank Kolkman] decided to see if one could build a surgery robot for less than an Arab prince spends on their daily commuter vehicle. The answer is, more-or-less, yes. Now, would anyone want to trust their precious insides to a 3D printed robot with dubious precision? Definitely not.
The end effectors were easily purchased from a chinese seller. Forty bucks will get you a sterile robotic surgery gripper, scissor, or scalpel in neat sterile packaging. The brain of the robot is basically a 3D printer. An Arduino and a RAMPS board are the most economical way to drive a couple steppers.
The initial version of the robot proves that for around five grand it’s entirely possible to build a surgery robot. Whether or not it’s legal, safe, usable, etc. Those are all questions for another research project.