We thought we were going to read an article about, perhaps, a quadcopter that could fetch beer, or donuts. What we got was more along the lines of a donut dragging itself across the floor, rendering it pitiful and advisibly indigestible.
Sometimes people joke about not wanting to get in mind of a crazy person. We understand. While we could certainly follow [Michael Kohn]’s logic, the motivation was alien. Either way, in a rare turn of events there was not a single Arduino to be seen; just reverse engineering, unique solutions, and even a custom board. This is what some of you have been asking for… we think.
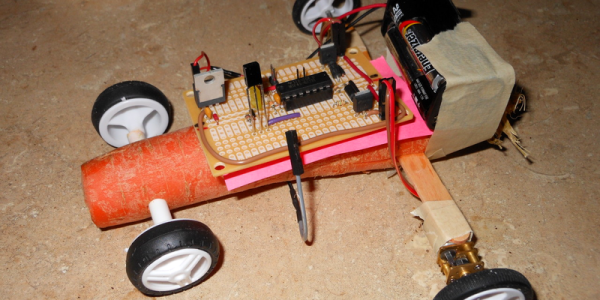
The brain of the questionable contraption is a TI MSP430G2231 and a tiny forward only motor driver circuit. The MSP waits for a signal from a hacked IR remote control from a cheap RC car. It then turns those into the appropriate motor control signals which go to some of those nice tiny metal gearboxes.
There were, naturally, a lot of technical issues in mounting the electronics to the food that, well… they didn’t need to be solved, but they were solved. For example, masking tape apparently does not stick well to green peppers, so toothpicks must be employed to pin the tape in place. Hopefully knowledge like this is scheduled for the nightly wipe while we sleep, but we’ll probably hold onto it till we die, unlike expensive piano lessons.
In the end we had a good laugh, and the idea is so dumb it will probably be an educational Kickstarter next week. Video after the break.
Continue reading “Technically A Hack. Still Questionable. Remote Control Food.” →