 [Patrick] has spent a lot of time around ground and aerial based autonomous robots, and over the last few years, he’s noticed a particular need for teams in robotics competitions to break through the ‘sensory bottleneck’ and get good data of the surrounding environment for navigational algorithms. The most well-funded teams in autonomous robotics competitions use LIDARs to scan the environment, but these are astonishingly expensive. With that, [Patrick] set out to create a cheaper solution.
[Patrick] has spent a lot of time around ground and aerial based autonomous robots, and over the last few years, he’s noticed a particular need for teams in robotics competitions to break through the ‘sensory bottleneck’ and get good data of the surrounding environment for navigational algorithms. The most well-funded teams in autonomous robotics competitions use LIDARs to scan the environment, but these are astonishingly expensive. With that, [Patrick] set out to create a cheaper solution.
Early this year, [Patrick] learned of an extremely cheap LIDAR sensor. Now [Patrick] is building a robotics distance measurement unit based on this sensor.
Early experiments with mechanically scanned LIDAR sensors centered around the XV-11 LIDAR, the distance sensor found in the Neato Robotics robot vacuum cleaner. [Patrick] became convinced a mechanically scanned LIDAR was the way forward when it came to distance measurement of autonomous robots. Now he’s making his own with an astonishingly inexpensive LIDAR sensor.
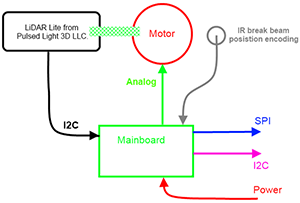
The basic idea of [Patrick]’s project is to take the PulsedLight LIDAR-Lite module, add a motor and processing board, and sell a complete unit that will output 360° of distance data to a robot’s main control system. The entire system should cost under $150 when finished; a boon to any students, teams, or hobbyists building an autonomous vehicle.
[Patrick]’s system is based on the PulsedLight LIDAR – a device that’s not shipping yet – but the team behind the LIDAR-Lite says they should have everything ready by the end of the month, all the better, because between these two devices, there’s a lot of cool stuff to be done in the area of autonomous robots.




 Inspired by a childhood love of dinosaurs, [Robert] set out to build a robotic dinosaur from the Ceratopsian family. After about a year of design, building, and coding, he has sent us
Inspired by a childhood love of dinosaurs, [Robert] set out to build a robotic dinosaur from the Ceratopsian family. After about a year of design, building, and coding, he has sent us 








