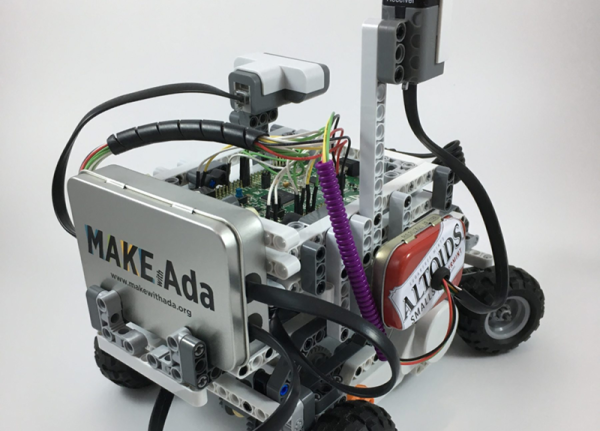
Back in the last century, the US Department of Defense declared that Ada was going to be used everywhere and for everything. Books were published, schools build curriculum. Working programmers, however, filled out waivers to continue working in their languages of choice. As a result, only a little bit of safety-critical software really used Ada. However, we’ve noticed a bit of a resurgence lately. Case in point: an RC car using Ada for the brains. You can watch it tool around in the video below.
This isn’t the first time we’ve heard about Ada in the past few months. Partially, this could be because of the availability of the GNU compiler, although that’s been around since 1995, so maybe there’s another explanation. Ada’s strong typing does tend to plug holes that hackers exploit, so while we would hate to say it is hack proof, it certainly is hack resistant compared to many popular languages.

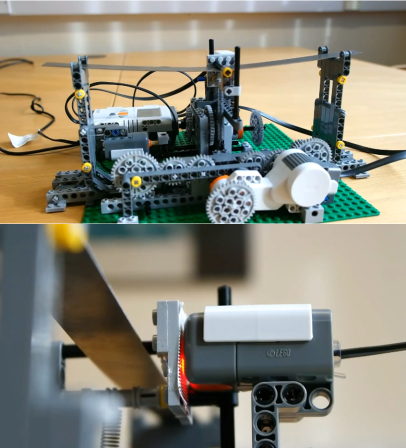 Learning with visuals can be very helpful. Learning with models made from NXT Mindstorms is just plain awesome, as [Rdsprm] demonstrates with this
Learning with visuals can be very helpful. Learning with models made from NXT Mindstorms is just plain awesome, as [Rdsprm] demonstrates with this 










