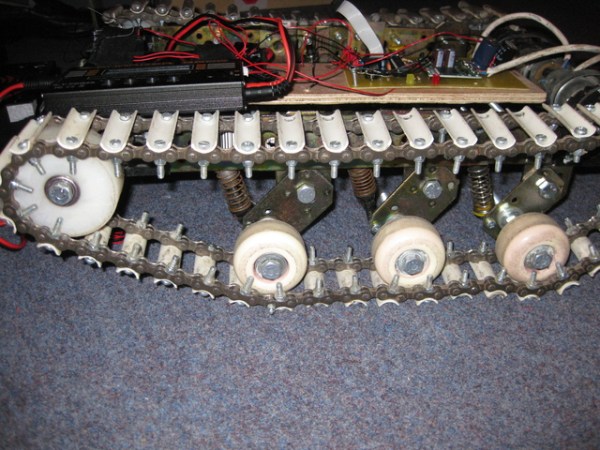
There’s all kinds of interesting things going into this tank robot build, but that beautiful suspension system immediately caught our eye. It helps to protect the body of the robot from being shaken apart when traveling over rough surfaces. Make sure to check out the four parts of the build log which are found on the left sidebar at the post linked above.
This a Master’s thesis project and has been built from common parts. The motors for the treads are pulled from a pair of cordless drills, with some capacitors added to help combat the draw when they start up. The treads themselves are each made from a pair of bicycle chains connected with numerous PVC pipe segments. The curved section of each PVC piece goes toward the chain, leaving the edges toward the ground for great traction. The tree wheels which support the middle of the tread each have a hinge and spring to absorb the shock of running full speed into concrete sidewalk corners like we see in the video after the break.
Continue reading “Tank Tread Robot Build Aims For A Smooth Ride”















