[Transistor-Man] and the gang finally got around to documenting their experience at the Detroit Makerfaire 2014 and the Powerwheels racing series. They weren’t planning on entering, but in a last-minute decision they decided to see if they could whip up an entry just over one week before the competition! They did — and it’s awesome. They call it the Chibi-Atomic-Jeep.
As the competition name implies, they had to base the vehicle off of a Powerwheels frame. Bunch of steel tubing, some TIG welding and a nice paint job, and they had the base frame of their vehicle. At the heart of it? An alternator from a van — surprisingly powerful and easy to control. They used cheap 8″ wheels from Harbor Freight Tools — they worked great, just didn’t last very long… By the time the races were over, they went through NINE of these tires. Good thing they’re cheap!
The most impressive part of the build is the gears. They made them using a water-jet cutter at the local hobby shop and a Bridgeport mill with an indexing head — not an easy task to complete!

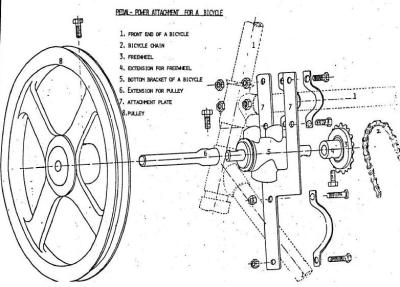 Next, a jack shaft made from a bike bottom bracket and crank is installed up front in between the top tube and down tube of the frame. On one side of the jack shaft is a sprocket and the other side is a large pulley. When converting to what [Job] calls ‘power production mode’, the chain going to the rear wheel is removed from the crank sprocket and replaced with a chain connected to the jack shaft.
Next, a jack shaft made from a bike bottom bracket and crank is installed up front in between the top tube and down tube of the frame. On one side of the jack shaft is a sprocket and the other side is a large pulley. When converting to what [Job] calls ‘power production mode’, the chain going to the rear wheel is removed from the crank sprocket and replaced with a chain connected to the jack shaft.