Have you been to FOSDEM? It’s a yearly two-day megaconference in Brussels, every first weekend of February. Thousands of software and hardware hackers from all across Europe come here each year, make friends, talk software and hardware alike, hold project-specific meetups to drink beer and talk shop, and just have a fun weekend surrounded by like-minded people.
In particular, FOSDEM has free admission – drop by for the weekend, no need to buy entry tickets, just sort out your accomodation, food, travel, and visit for a day or two. I’ve covered FOSDEM quite extensively in 2023, so if you want to know more about how it works, I invite you to check out that article – plenty of stories, cool facts about FOSDEM, showcases, and so on. This year, I’ve also been to FOSDEM, it’s been pretty great, and I’d like to tell you about cool things I’ve seen happen during FOSDEM 2025.
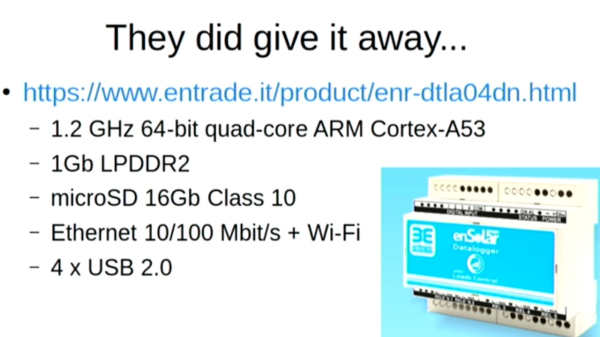
FOSDEM is often described as an open software conference, and you might’ve had been fooled by this if you simply have checked the Wikipedia page. However, let me assure you – there’s always plenty of hardware, large amounts of it! This year, I feel like hardware has taken the spotlight in particular – let me show you at least some of it, so that you know what kinds of cool stuff you can expect and plan for in 2026.